Главная
Рефераты по зарубежной литературе
Рефераты по логике
Рефераты по маркетингу
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по схемотехнике
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Дипломная работа: Ремонт агрегатов и систем транспортных средств фирмами-изготовителями
Дипломная работа: Ремонт агрегатов и систем транспортных средств фирмами-изготовителями
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ
УНИВЕРСИТЕТ
В.Н.Красовский
Дипломный проект
ОСНОВЫ ТЕХНОЛОГИИ ПРОИЗВОДСТВА И РЕМОНТА АВТОТРАНСПОРТНЫХ СРЕДСТВ
Тема: Ремонт агрегатов и систем транспортных средств фирмами-изготовителями
Тюмень 2009
ОГЛАВЛЕНИЕ
Содержание
Введение
1 ПРОИЗВОДСТВЕННЫЙ ПРОЦЕСС КАПИТАЛЬНОГО РЕМОНТА АВТОМОБИЛЕЙ
1.1 Основные понятия
1.2 Структура производственного процесса
1.3 Принципы организации производственного процесса
1.4 Показатели функционирования производственного процесса
1.5 Основные элементы технологического процесса ремонта
1.6 Тупиковый и поточный методы организации ремонта
2 СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ИЗДЕЛИЙ В АВТОРЕМОНТНОМ ПРОИЗВОДСТВЕ
2.1 Виды контроля
2.2 Входной контроль поступающего на АРП ремонтного фонда
2.3 Правила выбора средств технологического оснащения процессов технического контроля
3 ПРОЕКТИРОВАНИЕ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ И СИСТЕМ РЕМОНТНОГО ПРОИЗВОДСТВА
3.1 Проектирование разборочного процесса
3.2 Формирование последовательности и содержания операций единичного и типового ТПР
3.3 Виды технологических процессов
3.4 Типизация технологических процессов
4 ОСНОВНЫЕ ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ ПОТОЧНЫХ ЛИНИЙ
4.1 Понятия и определения поточного производства
4.2 Классификация поточных линий
4.3 Расчет такта производства и выбор вида движения конвейера
4.4 Синхронизация операций на ОНПЛ
4.5 Алгоритм методики формирования операций при их синхронизации
4.6 Пример
5 АНАЛИТИЧЕСКИЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ПОТРЕБНОСТИ В РЕМОНТАХ
6 ПРОЕКТИРОВАНИЕ АВТОРЕМОНТНЫХ ПРЕДПРИЯТИЙ
6.1 Структура АРП и его компоновка
6.2 Нормы строительного проектирования
6.3 Общая схема производственного процесса ремонта автомобилей
7 ТЕХНОЛОГИЧЕСКИЙ РАСЧЕТ АРП
7.1 Общие положения
7.2 Годовая программа и режим работы предприятия
7.3 Годовые фонды времени
7.4 Трудоемкость объектов ремонта
7.5 Расчет годового объема работ и состава работающих
7.5.1 Годовой объем работ
7.5.2 Расчет количества производственных рабочих
7.5.3 Количество вспомогательных рабочих
7.5.4 Количество ИТР, счетно-конторского персонала (СКП), МОП и пожарно-сторожевой охраны (ПСО)
7.6. Расчет количества оборудования и рабочих мест
7.6.1 Методы расчета оборудования
7.6.2 Расчет оборудования по трудоемкости (станкоемкости) объектов ремонта
7.6.3 Расчет оборудования по продолжительности технологических операций
7.6.4 Расчет оборудования по физическим параметрам объектов ремонта
7.7. Расчет площадей помещений
7.7.1 Расчет производственно-складских помещений (ПСП)
8 ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ РЕМОНТА АВТОТРАНСПОРТНЫХ СРЕДСТВ
8.1 Основные положения
8.2 Основные технико-экономические показатели, характеризующие качество функционирования системы современного производства
8.3 Основные источники экономической эффективности
8.3.1 Методика оценки экономической эффективности капитального ремонта
Список использованной литературы
ВВЕДЕНИЕ
В процессе эксплуатации машины неизбежно выходят из строя по причине изнашивания и других повреждений деталей. Расходы на ремонт и техническое обслуживание автомобилей за период эксплуатации в несколько раз превышают их стоимость. Производственные мощности предприятий, занятых ремонтом автомобилей, почти в 4 раза больше, чем мощности предприятий по их изготовлению. Трудоемкость ремонта и технического обслуживания автомобилей за период работы до списания во много раз превышает трудоемкость изготовления новых.
Чтобы снизить трудовые и денежные затраты на поддержание техники в работоспособном состоянии необходимо значительно улучшить техническое обслуживание и использование парка автомобилей, укрепить ремонтную базу.
Для успешного выполнения поставленных задач необходимо следующее: улучшить качество подготовки слесарей-ремонтников и рабочих других профессий; постоянно совершенствовать ремонтную базу и организацию ремонтного производства; улучшить обеспечение станочным, кузнечно-прессовым и ремонтно-технологическим оборудованием ремонтные предприятия; обеспечить производство запасных частей к автомобилям, и технологическому транспорту в соответствии с потребностью в них по установленным нормам; повысить качество ремонта, коэффициент готовности машин и оборудования, ответственность за преждевременное списание техники.
Цель данного конспекта лекций — раскрыть главные причины изнашивания и других повреждений деталей и сборочных единиц, дать основные сведения о возможных дефектах деталей машин, способах их обнаружения и устранения, охарактеризовать мероприятия, повышающие износостойкость и надежность восстанавливаемых деталей и соединений, помочь студентам овладеть прогрессивными технологическими процессами и приемами ремонта машин, технологическим оборудованием, а также ознакомить их с основами организации и экономики ремонтного производства, с требованиями безопасной работы при ремонте машин.
1 ПРОИЗВОДСТВЕННЫЙ ПРОЦЕСС КАПИТАЛЬНОГО РЕМОНТА АВТОМОБИЛЕЙ
1.1 Основные понятия
Производство – это целенаправленная деятельность людей и механизмов по изготовлению и ремонту изделий.
Производственный процесс – совокупность всех действий людей и орудий производства, необходимых для изготовления и ремонта изделий. Производственный процесс состоит из технологических процессов, составляющих основное производство, которое обеспечивается вспомогательным производством и обслуживающими процессами.
Вспомогательное производство – изготовление и ремонт средств технологического оснащения; выработка и подача сжатого воздуха, энергии и других средств, необходимых для выпуска продукции.
Обслуживающие процессы – транспортные, контрольные и складские операции.
Технологический процесс – часть производственного процесса, содержащая действия по изменению и последующему определению состояния предмета производства.
В зависимости от условий производства различают следующие виды ТП: проектные, рабочие, маршрутные, операционные, маршрутно-операционные, единичные, временные, перспективные, типовые, стандартные. ТП состоит из операций, установок, переходов, позиций.
1.2 Структура производственного процесса
Производственный процесс капитального ремонта автомобилей включает технологические, энергетические, транспортные, складские и др. операции, обеспечивающие выпуск готовой продукции.
Перечисленные выше особенности АРП, низкая механизация и автоматизация ремонтных работ по сравнению с автоматизированными поточными линиями, недостаточная концентрация и специализация производства приводят к тому, что трудоемкость капитального ремонта автомобилей в 2-3 раза выше, чем их изготовление на автозаводах, а ходимость отремонтированных автомобилей ниже новых.
1.3 Принципы организации производственного процесса
Выпуск готовой продукции базируется на организации производства, труда и управления.
Организация производства – это рациональное сочетание средств производства, предметов и условий труда, обеспечивающих выпуск готовой продукции требуемого качества при регламентированных материальных, финансовых и трудовых затратах.
Организация труда – это система мероприятий, обеспечивающих рациональное использование рабочей силы за счет рациональной расстановки людей в процессе производства, разделения труда, кооперирования, использования прогрессивных приемов и методов, нормирования и стимулирования труда, научной организации рабочих мест, их обслуживания и создания благоприятных условий для работы.
Организация управления – это комплекс мероприятий по сбору информации о производстве, ее обработке, принятию решений, доведению их до исполнителей, контролю и регулированию производства с целью повышения эффективности использования ресурсов и качества готовой продукции.
Основные принципы организации производственного процесса:
1. Специализация производства – выпуск узкой номенклатуры изделий на одном предприятии при достаточно большом объеме производства. Различают:
а) по месту применения:
- внутризаводскую;
- цеховую;
- рабочих мест.
б) по виду:
- предметную;
- подетальную;
- технологическую.
Специализация позволяет шире принимать стандартные решения, использовать типовые ТП и унифицировать оснастку.
2. Прямоточность – это обеспечение кратчайшего пути прохождения ремонтируемых изделий по всем стадиям и операциям производственного процесса. При этом сокращается время на межоперационную транспортировку изделий.
Различают следующие виды движения изделий:
а) последовательное (восстановление и изготовление деталей) – обеспечивается более полная загрузка оборудования, но вызывает длительное нахождение деталей на постах обработки;
б) параллельное – обеспечивает непрерывность производства и сокращает время пребывания изделия в ремонте, но при этом необходимо обеспечение синхронности и кратности смежных операций;
в) последовательно-параллельное – применяется , когда операции производственного процесса не синхронизированы и оборудование на участках имеет различную производительность.
Производственный процесс на АРП организуют с прямым, Г-образным и П-образным движением ремонтируемых изделий.
а) прямой поток (рис.1.1):

Достоинство - прямолинейность движения наиболее тяжелых деталей, позволяющая использовать несложные подъемно-транспортные механизмы.
Недостаток - несоответствие площадей основных участков образующимся боковым потокам ремонтируемых агрегатов, узлов и деталей.
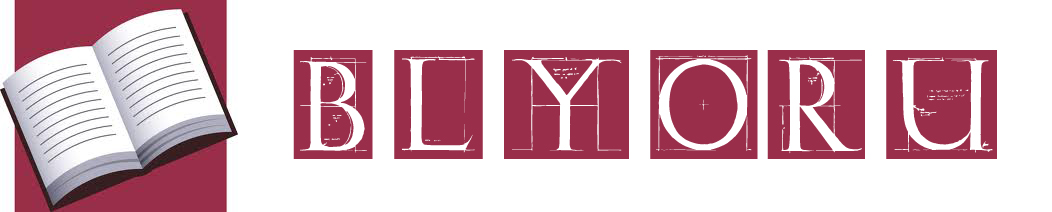
б). Г – образный поток (рис.1.2):
Достоинство - возможность изоляции разборочно-моечных участков от сборочных и др. участков.
Недостаток - непрямолинейность технологического потока.
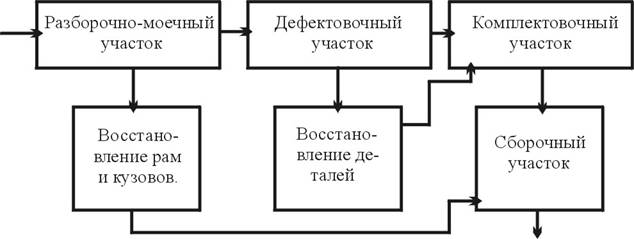
в). П-образный поток (рис.1.3):
Достоинство: одновременное выполнения составляющих производственного процесса, более широкий фронт работ, сокращение времени пребывания изделия в ремонте.
3. Пропорциональность – это соответствие мощностей всех цехов и участков (и вспомогательных) плановым заданиям по ремонту определенной номенклатуры изделий.
Принцип пропорциональности состоит в том, что количество исполнителей
на каждом участке (рабочем месте) должно быть пропорционально трудоемкости выполняемых на нем операций:
Т1: Т2 :…:Тi = Р1: Р2: …: Рj;
где: Тi – трудоемкость i–й составной части производственного процесса;
Рj – численность исполнителей на j–м посту.
Пропорциональность обеспечивает бесперебойную работу всех звеньев ремонтного предприятия, исключает узкие места и диспропорции в производстве. Повышение степени пропорциональности всех участков АРП обеспечивает увеличение его производственных мощностей, улучшение использования производственных фондов.
4. Непрерывность - характеризуется выполнением основных и вспомогательных операций без разрыва во времени. Обеспечивается максимальной синхронизацией всех операций производственного процесса, которая достигается изменением числа постов, перераспределением работ по постам, изменением трудоемкостей операций за счет механизации и автоматизации, выполнением части работ вне потока или на параллельных постах.
Непрерывность оценивается коэффициентом неравномерности ήн:
n n
ήн = Σti / Tц →max или ή1 = (Tц - Σti )/ Τц→min;
i=1 i=1
где: Σti - длительность технологического цикла по i-м операциям;
i=1
Тц - длительность производственного цикла.
Непрерывность использования средств труда оценивается коэффициентом загрузки оборудования:
nc nc
η3 = Σti/ΣΦi;
где: ti – время работы i-го станка;
Фi – годовой фонд работы i-го станка;
nс – число станков на производстве.
5. Кратность распределения трудоемкости по постам является предпосылкой создания поточного производства. Условие кратности:
а1Т1 = а2 Т2 = … = аn Тn ;
где: аn – коэффициент кратности.
6. Ритмичность – постоянство выпуска изделий определенного наименования в расчетный период. При равномерном выпуске в каждую декаду должно выпускаться 33,3% от месячной программы. Оценивается фактическая ритмичность коэффициентом ритмичности:
n n
kр = 1 - [Σai/ΣNi];
где: аi – отрицательное отклонение выпуска от задания по программе;
Ni – величина планового задания;
n- количество анализируемых периодов.
7. Автоматичность – приспособленность производственного процесса к внешним возмущающим факторам без участия или под контролем исполнителей. Практически отсутствует и обеспечивается людьми.
Рациональная организация производственного процесса должна обеспечивать постоянное повышение производительности труда, качества продукции, снижение ее себестоимости, улучшение использования основных производственных фондов и оборотных средств.
1.4 Показатели функционирования производственного процесса
Основные показатели функционирования производственного процесса по ГОСТ 14. 004 – 74 ЕСТПП:
1. Производственный цикл – это интервал календарного времени от начала до окончания процесса изготовления или ремонта изделия.
2. Технологический цикл – это сумма календарного времени на выполнение технологических операций при изготовлении или ремонте изделий.
3. Такт выпуска – это интервал времени, через который производится выпуск изделий определенного наименования:
Тв = 60Фс / Νс ;
где: Фс – полезный фонд времени за смену, ч.;
Νс – величина выпуска изделий за смену, шт.
4. Ритм производства :
R = Nр/Тр;
где: Nр – план выпуска изделий за расчетный период;
Тр – продолжительность расчетного периода.
Длительность производственного цикла Тц зависит от его структуры, под которой понимают состав и соотношение затрат времени на основные технологические и вспомогательные операции и перерывы:
Tц = Σti + Σtk + Σtтр + Σtс + Σtпер ;
где: ti – время выполнения i-ой технологической операции;
tk и tтр – время выполнения вспомогательных (контрольных и транспортных) операций;
tс – время протекания естественных процессов (сушка, старение и т.п.);
tпер – перерывы в производственном процессе.
Технологический цикл обработки партии изделий Ттех равен:
Ттех = Σti = Σ( t0+tв+tпз)i ;
где: t0 – основное время обработки партии изделий;
tв – вспомогательное время обработки партии изделий;
tпз – подготовительно-заключительное время обработки партии изделий.
Эффективность структуры производственного цикла оценивают следующими показателями:
1. Длительностью (см. выше);
2. Коэффициентом параллельности:
kn = Tцпар /Tцпосл;
Разность 1 –kп указывает на резерв сокращения производственного цикла за счет изменения вида движений изделий в производстве.
3. Коэффициент цикличности:
kц = Tил / Тц .
Он показывает повторяемость процесса производства изделий данного наименования за планируемый период Тпл. Чем выше kц, тем совершеннее производство.
4. Коэффициентом плотности kпл, который характеризует долю основного и вспомогательного времени в общем цикле производства изделий данного наименования:
n n n n
kпл = [Σti + Σtk + Σtтр + Σtс]/ Тц;
Разность 1-kпл характеризует потери времени на перерывы в производственном цикле.
1.5 Основные элементы технологического процесса ремонта
На авторемонтном предприятии (АРП) выполняют технологические, энергетические, транспортные и складские работы, связанные с ремонтом изделия.
Совокупность взаимосвязанных действий людей и орудий производства, необходимых на данном предприятии для ремонта изделия называется производственным процессом.
Технологический процесс – это часть производственного процесса, содержащая целенаправленные действия по изменению и определению состояния предмета труда. Технологический процесс состоит из последовательности выполняемых технологических операций. Технологическая операция – это законченная часть технологического процесса, выполняемая на одном рабочем месте. Законченная часть технологической операции (технологический режим и установка), выполняемая одними и теми же средствами технологического оснащения, называется переходом.
Рабочее место – это элементарная единица структуры предприятия, где размещены исполнители работ, обслуживаемая ими единица технологического оборудования (станки, прессы, гальванические ванны и т.д.) или часть конвейера, а также оснастка и, на ограниченное время, предметы труда. Комплекты документов по степени детализации описания подразделяют на: маршрутные, операционные, маршрутно-операционные.
1.6 Тупиковый и поточный методы организации ремонта
Тупиковый метод – реализуется на универсальных и специализированных рабочих местах.
На универсальных постах ремонт выполняется одной бригадой, которая производит все операции от начала и до конца. На специализированных – выполняют ремонт одной сборочной единицы или определенную технологическую операцию.
Поточная организация – это расположение средств технологического оснащения в последовательности выполнения операции и с определенным интервалом выпуска изделий.
Технологические операции закрепляют за рабочими местами, расположенными согласно технологическому процессу. Поточные линии могут быть одно и многопредметными, прерывными и непрерывно-поточными.
| Сдача машины в ремонт | ||||||||||||
|
Наружная очистка машин | |||||||||||
| Разборка на агрегаты и сборочные единицы | ||||||||||||
| Очистка агрегатов и сборочных единиц | ||||||||||||
| Разборка агрегатов на детали | ||||||||||||
| Очистка деталей и сборочных единиц | ||||||||||||
| Утиль | ДУ II уровня Размеры |
|
||||||||||
|
||||||||||||
| Утиль | ДУ III уровня | внутренние дефекты | ||||||||||
| годны на склад | ||||||||||||
| Склад | ||||||||||||
|
Восстановление ТП | |||||||||||
|
||||||||||||
|
||||||||||||
|
Комплектация | |||||||||||
|
Сборка агрегатов | |||||||||||
|
||||||||||||
|
Испытание агрегатов | |||||||||||
|
||||||||||||
|
Окраска | |||||||||||
|
||||||||||||
|
Сборка автомобилей, обкатка и испытание |
|||||||||||
|
||||||||||||
| Окраска | Склад | |||||||||||
| Выдача автомобиля заказчику | ||||||||||||
|
||||||||||||
|
||||||||||||
Рис. 1.6. Последовательность процесса ремонта автомобилей
|
Производственный процесс 100 |
|||||||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
|
Основные, 70 | Вспомогательные, 12 | Обслуживающие, 18 |
|
||||||||||||||||||
|
||||||||||||||||||||||
| Разборка, 7 | Мойка, 3.5 | Контроль и сортир. 3.5 | Ремонт обор-ия, 5 | Энерго-снабжен. 4.8 | Транспортные, 6.3 | Складские, 7.2 | ||||||||||||||||
|
||||||||||||||||||||||
|
||||||||||||||||||||||
| Вос-ие деталей, 28 | Изгот-ие деталей, 7 | Комплектование узлов, 1.4 | Изготовление оснастки и инструмента, 2.2 | Контрольные, 4.5 |
|
|||||||||||||||||
|
||||||||||||||||||||||
| Сборка, 14 | Испытания, 3.5 | Окраска, 2.1 | ||||||||||||||||||||
Рис.1.5. Составляющие производственного процесса капитального ремонта автомобилей
2 СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ИЗДЕЛИЙ В АВТОРЕМОНТНОМ ПРОИЗВОДСТВЕ
2.1. Виды контроля
Контроль является неотъемлемой частью любой системы управления. Он позволяет сопоставить результаты реального функционирования производственной системы с запланированными результатами.
Контролем качества продукции называют проверку соответствия показателей качества продукции требованиям, установленным в НТД (ГОСТы, СтП, ТУ, паспорт изделия и т.д.).
Контроль качества продукции на АРП осуществляется специально организованными службами технического контроля, состав и структура, которых, а также их права и обязанности определяются «Положением об ОТК» , утверждаемым директором предприятия.
Главной задачей ОТК АРП является предотвращение выпуска продукции, не удовлетворяющей установленным в НТД требованиям при минимально возможном уровне внутреннего брака.
На ОТК возможны следующие функции:
1. Входной контроль за качеством сырья, материалов, полуфабрикатов, комплектующих изделий;
2. Сбор информации о стабильности качества продукции предприятий- поставщиков и оформление актов для предъявления к ним претензий;
3. Проверка точности технологических процессов;
4. Проверка точности технологического оборудования;
5. Инспекционный контроль хранения материалов;
6. Приемочный контроль качества отремонтированных изделий;
7. Анализ дефектов продукции на различных стадиях ее производства и в эксплуатации и др.
На современных АРП применяются следующие основные виды контроля, которые классифицируются по следующим признакам.
1. По месту организации контроля на том или ином этапе производства:
а) входной – это контроль состояния ремонтного фонда, запчастей, материалов, полуфабрикатов, комплектующих изделий, поступающих от других предприятий или участков производства. Он позволяет избежать снижения качества продукции из-за ошибок поставщика;
б) операционный - контроль продукции (или техпроцесса), выполняемый после завершения определенной производственной операции;
в) приемочный – контроль готовой продукции после завершения всех технологических операций. По его результатам принимается решение о пригодности продукции к использованию.
2. По охвату контролируемой продукции:
а) сплошной – контроль, при котором решение о качестве контролируемой продукции принимается по результатам проверки каждой единицы продукции;
б) выборочный – контроль, при котором решение о качестве контролируемой продукции принимается по результатам проверки одной или нескольких выборок (проб) из партии или потока продукции.
3.По месту проведения :
а) стационарный - это приемочный или операционный контроль, выполняемый на специализированном контрольном пункте, куда доставляют изделия для контроля. Этот вид контроля широко применяется в АРП-ве, т.к. он хорошо вписывается в ритм техпроцесса;
б) скользящий – применяется, если контроль не вписывается в ритм техпроцесса. В этом случае средства контроля доставляются на рабочее место, где контролер и проводит измерения.
Особым видом контроля качества продукции являются испытания – это экспериментальное определение значений параметров и показателей качества продукции в процессе функционирования или при имитации условий эксплуатацию.
Организационные формы контроля на АРП могут быть различными и зависят от конкретного производства, его масштабов, специализации АРП и др. факторов.
2.2 Входной контроль поступающего на АРП ремонтного фонда
На АРП реализуется обычно три вида входного контроля:
а) входной контроль т/с и комплектности поставки автомобилей и агрегатов;
б) входной контроль качества материалов, полуфабрикатов и комплектующих изделий, поступающих с других предприятий;
в) входной контроль т/с деталей ремфонда, осуществляемый(после разборки агрегатов) на участке контроля – сортировки – дефектация.
Качество и точность работы контролеров, определяет стоимость КР, номенклатуру и количество восстанавливаемых, повторно используемых и заменяемых деталей.
Средняя стоимость ремонта детали определяется по формуле:
Сср = kг Сг + kв Св + kз Сз ;
где: kг; kв и kз – коэффициенты годности, восстановления и замены деталей.
Сг; Св и Сз – стоимость годной, восстановленной и заменяемой деталей.
Установлено, что в среднем:
Сг = 0,1 Сн;
Св = 0,6 Сн;
Сз = Сн;
где Сн – стоимость новой запасной детали.
Тогда: Сср = 0,1kгСн = 0,6kвСн = kзСн.
В среднем можно принять:
kг = 0,2;
kв = 0,6;
kз = 0,2.
Тогда: Сср = 0,1·0,2Сн + 0,6·0,6Сн + 0,2Сн = 0,58Сн.
2.3 Правила выбора средств технологического оснащения процессов технического контроля.
Выбор средств контроля должен основываться на обеспечении заданных показателей процессов контроля в установленное время при заданном качестве изделия.
В ГОСТ ЕСТПП установлены обязательные показатели процесса контроля:
- точность измерений;
- достоверность;
- стоимость;
При выборе средств контроля необходимо использовать наиболее эффективные, для конкретных условий, средства контроля, регламентированные стандартами. Методика выбора средств контроля включает следующие этапы:
1. Анализ характеристик объекта контроля и показателей процесса контроля.
2. Определение предварительного состава средств контроля, которые могут обеспечить заданные показатели процесса контроля с учетом метрологических и эксплуатационных характеристик средств контроля.
3. Определение окончательного состава средств контроля путем сравнения их экономической эффективности.
Экономическая эффективность, выбираемых дорогостоящих средств контроля рассчитывают по методике, изложенной в (Артек).
Экономическая эффективность средств контроля, стоимость которых менее 50 руб., рассчитывают по формуле:
Э = (Сm + A1/T1) – (Cm + A2/T2 ) ,
где: Э – экономическая эффективность сравниваемого средства контроля, руб.;
С , С – затраты на заработную плату контролерам при контроле одного объекта для первого и второго сравниваемых средств контроля, руб./шт.;
m – программа объектов контроля в год, шт.;
А ,А - стоимость единицы сравниваемых средств контроля, руб.;
Т ,Т - сроки службы сравниваемых средств контроля, годы.
3 ПРОЕКТИРОВАНИЕ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ И СИСТЕМ РЕМОНТНОГО ПРОИЗВОДСТВА.
Цель проектирования ТП – установление оптимальной последовательности и способов выполнения отдельных технологических операций ремонта изделия; подбор необходимого оборудования, оснастки и инструмента; определение оптимальных режимов обработки и технических норм времени на выполнение работ.
3.1 Проектирование разборочного процесса
Разборочные работы составляют значительную долю от общей трудоемкости, отличаются наиболее тяжелыми условиями труда и низкой степенью механизации. Выделяют два основных направления повышения эффективности разборочного процесса (РП):
1. Научно-обоснованное управление технологическим процессом и участком разборки в целом, обеспечение наивысшей производительности труда при имеющейся производственно-технологической базе;
2. Создание автоматизированных процессов разборки.
Нередко высказывается мнение о полной негативности разборочного процесса сборочному. Однако различие предопределяется уже целями реализации этих процессов:
- цель сборки – получение сборочных единиц и изделий, полностью отвечающих установленным для них требованиям;
- цель разборки – получение деталей с обеспечением их максимальной сохранности.
Различие целей разборочного и сборочного производств не позволяет механически использовать способы и методы проектирования сборочного процесса для разборочного.
Однако между разборочным (РП) и сборочным (СП) процессами имеется ряд общих признаков. Для проектирования рабочего РП на АРЗ необходима следующая информация:
а). Базовая, включающая данные о технологическом процессе сборки машины на заводе-изготовителе; чертежи конструкции машины и годовую производственную программу разборки машин;
б). руководящая – стандарты на ТП, методы управления ими, оборудование и оснастка, документация на единичные и типовые ТП разборки аналогичного ремфонда;
в). справочная, содержащаяся в каталогах, паспортах, справочниках по выбору технологических нормативов, планировках участков, а также данные о состоянии ремфонда, о прогрессивных способах разборки и их предпочтительности, об оборудовании участка разборки и сменности его работы, а также обобщенный передовой опыт работы РП лучших АРЗ.
Основные этапы разработки технологического процесса разборки (ТПР):
1. Анализ исходной информации;
2. Поиск и выбор единичного ТПР аналогичного агрегата;
3. Уточнение или разработка технологических операций и переходов;
4. Определение последовательности и содержания технологических операций разборки;
5. Нормирование ТПР;
6. Выбор оборудования;
7. Расчет экономической эффективности вариантов ТПР;
8. Выбор оптимального варианта ТПР.
Основными задачами при проектировании ТПР являются:
- определения оптимальной последовательности и содержания разборочных работ и количество операций;
- выбор технологического оборудования.
Существующая практика проектирования ТПР предусматривает только учет последовательности снятия узлов с указанием применяемого оборудования. При этом формирование технологических операций производится инженером-технологом методом проб без оптимизации числа и содержания операций.
3.2 Формирование последовательности и содержания операций единичного и типового ТПР
Анализ ряда РП показывает, что порядок снятия узлов и деталей с агрегатов допускает большое число вариантов. Можно, однако, предположить, что существует некоторый оптимальный вариант ТПР.
Методика формирования операций ТПР разрабатывается с использованием теории графов и анализа сложных систем.
ТПР характеризуется «расходящейся» структурой и в общем виде может быть представлена в форме ориентированного графа, который учитывает последовательности выполнения технологических переходов (технологически неделимых элементов).
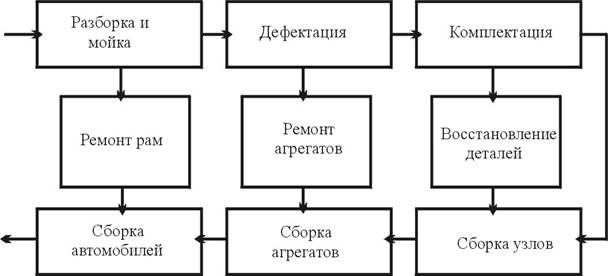
Рассмотрим процесс разборки двигателя автомобиля ЗИЛ-130 (рис.3.1).
Анализ ТПР двигателя ЗИЛ-130 показывает, что весь процесс разборки можно разделить на 3 зоны:
I зона – съем внешних узлов, не связанных отношениями предшествования – имеет интенсивные ветвления.
В основе построения ТПР в форме графа лежит принцип разбиения графа технологии на слои с последующим их ранжированием. В нулевом слое помещают элемент, относящийся к началу процесса (например, установка агрегата). Далее располагаются слои, включающие элементы ТПР, не связанные отношениями предшествования, а затем идут слои с ранжируемыми в зависимости от последовательности независимыми и зависимыми элементами.
Рис.3.1 Графоаналитическая модель процесса разборки автомобиля
II зона – съем внешних узлов и основных узлов, связанных отношениями предшествования – имеет менее интенсивное ветвление. III зона – получение базовой детали (например блок цилиндров).
Рассмотренная методика построения ТПР не учитывает ограничения, накладываемые:
- требованиями одновременности выполнения отдельных операций, объединяемых, например, на основе механизации;
- позиционные ограничения.
В МАДИ разработана методика формирования ТПР с использованием эвристического алгоритма.
Пусть ТПР двигателя ЗИЛ-130 состоит из множества L технологических операций:
L = {l:l =1,L };
каждая из операций состоит из множества М технологических элементов:
М = {i:i =1,М}.
Пусть также по каждому i–му элементу известно время его выполнения (длительность) ti.
Введем целочисленную переменную δil, которая принимает значения:
δil=1, если I-й элемент содержится в l–й технологической операции;
δil=0, в противном случае.
Тогда ТПР может быть формализован (с учетом требований одновременности и позиционности) следующими соотношениями, представляющими его математическую модель:
M
1. Σδil =1 – выполнение каждого элемента на одном рабочем месте.
i=1
M
2. Σti δil ≤r – непревышение длительности операции такта r.
i=1
l
3. δil ≤ Σδjk – соблюдение условий предшествования для каждой пары i
k=1
j (при i > j ) l-й и k-й операции.
Пусть известно некоторое позиционное ограничение Р. Тогда требование выполнения операции в одной позиции запишется так:
|Pi – Pj | δil + |Pi – Pj | δjl ≤ | Pi - Pj |
где: i и j – индексы элементов.
I Этап разработки ТПР
На основе анализа конструкции двигателя выявляют:
- наиболее удобные позиции слесаря разборщика;
- вид работы (ручной, механизированный);
- последовательность выполнения технологических элементов.
Например, для двигателя ЗИЛ-130:
| Зона |
N элемента |
Элементы ТПР двигателя | Код |
| I |
1. 2. 3. 4. 5. 6. |
Отвернуть болты крепления и снять их. Снять распределитель зажигания в сборе. Отвернуть болты крепления, снять шайбу и гайку. Снять фильтр тонкой очистки топлива. ……… Отвернуть гайки крепления кронштейна фильтра тонкой очистки. Снять кронштейн фильтра. ……… |
30 31 32 33 … 43 44 … |
| II |
7. 8. 9. 10. |
Отвернуть гайки крепления крышки головок цилиндров левого ряда. Снять крышку и прокладку головок левого ряда. Отвернуть гайки крепления крышки головок цилиндров правого ряда. Снять крышку и прокладку головок правого ряда. ……… |
76 77 78 79 … |
| III |
11. 12. 13. 14. |
Установить крышки коренных подшипников на блок и закрепить их. Отвернуть болты крепления картера и снять их. Снять блок, установить на подставку, прочистить масляные каналы. Отсоединить картер сцепления. |
194 195 196 197 |
II Этап - построение графа ТПР
1. По существующим порядкам определения последовательности элементов ТПР .
2. Ориентированный граф.
3.3 Виды технологических процессов
ГОСТами ЕСТПП установлены два вида ТП: единичный и типовой.
Единичный ТП – это ТП изготовления или ремонта изделий одного наименования, типоразмера и пополнения независимо от типа производства.
Типовой ТП характеризуется единством содержания и последовательностью
Большинства технологических операций и переходов для групп изделий с общими конструктивными признаками.
Групповым ТП называется совокупность групповых технологических операций, обеспечивающих восстановление свойств изделия (или нескольких групп изделий) по общему технологическому маршруту (ТМ). При групповом ТМ предполагается прохождение групп изделий или их представителей с пропуском отдельных операций. Группой называется совокупность изделий, характеризуемая при ремонте общностью оборудования, оснастки, наладки и ТП.
При построении групповых ТП за базовое изделие берут комплексную единицу ремфонда, под которой понимается реальная или условная (искусственная) единица ремфонда, содержащаяся в своей конструкции все основные элементы, характерные для изделия данной группы и являющаяся ее конструктивно-технологическим представителем.
Каждый вид ТП характеризуется следующими признаками:
a. основным назначением процесса (рабочий, перспективный);
b. степенью детализации процесса (маршрутный, операционный, маршрутно-операционный).
Рабочий ТП выполняют по рабочей технологической или конструкторской документации.
Перспективный ТП – это процесс, который полностью или частично предстоит освоить на предприятии, используя последние достижения науки и техники.
Маршрутный ТП выполняют по документации, в которой содержание операций излагается без указания переходов и режимов обработки.
Операционный ТП выполняют по документации, в которой содержание операций излагается с указанием переходов и режимов обработки.
Маршрутно-операционный ТП выполняют по документации, в которой содержание отдельных операций излагается без указания переходов и режимов обработки.
Проектирование ТП является составной частью системы технологического проектирования предприятия, которая в государственном масштабе лимитируется
ГОСТами ЕСТПП.
Основным фактором, определяющим степень дифференциации ТП, является характер производства и связанный с ним объем выпуска продукции.
Объем выпуска продукции – это количество изделий определенного наименования, типоразмера, исполнения, ремонтируемых предприятием в течение планируемого интервала времени.
Тип производства – классификационная категория производства, выделяемая по признакам широты, номенклатуры, регулярности, стабильности и объема ремонта изделий.
Одной из основных характеристик типа производства является коэффициент закрепления операций (КЗО).
КЗО – это отношение числа всех различных технологических операций, выполненных в течение месяца, к числу рабочих мест.
c. Для мелкосерийного производства: Кзо=20-40;
d. Для среднесерийного производства: Кзо=10-20;
e. Для крупносерийного производства: Кзо=1-10;
f. Для массового: Кзо=1.
3.4 Типизация технологических процессов
В настоящее время практика технологической подготовки производства на АРЗ, базирующаяся на разработке и применении индивидуальных ТП, устарела и не способствует техническому прогрессу. Много сил и средств затрачивается на проектирование ТП, которые при современных темпах изменении номенклатуры ремонтируемых изделий быстро оказаться ненужными или устаревшими.
Одним из путей повышения эффективности проектирования ТП является проведение их технологической унификации, которая позволяет сократить сроки ТПП и выполнить ее на более высоком организационно-техническом уровне при меньших затратах материальных и трудовых ресурсов.
Основные направления технологической унификации:
1. Типизация ТП.
2. Разработка и внедрение групповых ТП.
Под типизацией ТП понимается разбивка изделий на конструктивно-технологические классы (типы) и составление для каждого из них типового ТП.
4 ОСНОВНЫЕ ПРИНЦИПЫ ПРОЕКТИРОВАНИЯ ПОТОЧНЫХ ЛИНИЙ
4.1 Понятия и определения поточного производства
Поточным называется процесс, при котором работа идет непрерывно и собранные готовые изделия выходят периодически, через определенный промежуток времени (такт производства).
Для осуществления сборки по поточному принципу необходимо:
1. Обеспечить взаимозаменяемость деталей, при которой исключается пригонка их по месту.
2. Расчленить вес техпроцесса на отдельные переходы и сформировать из них операции так, чтобы обеспечить синхронизацию операций и создание определенного темпа (такта), дающего непрерывность потоку собираемых изделий.
3. Точно определить потребное для каждой операции количество рабочих необходимой квалификации, приспособлений и инструментов, которыми следует пользоваться при выполнении конкретной операции.
4. Во избежание задержки сборки обеспечить регулярную и своевременную доставку к рабочим местам комплектов деталей и сборочных единиц, а также принадлежностей, приспособлений, инструментов и материалов.
5. Всю организацию работы поточной линии разработать подробно и точно.
Процесс наладки поточного производства довольно сложен, однако это окупается в дальнейшем теми преимуществами, которые он дает:
-специализация рабочих на выполнение отдельных операций;
-меньше затраты времени на выполнение каждой операции (появление специализированных навыков у рабочих);
-удешевление процесса сборки, а следовательно и снижение себестоимости изделия;
-повышение пропускной способности сборочного цеха;
-лучшее использование квалификации рабочих при распределении их по операциям соответственно сложности последних;
-повышение эффективности использования площади сборочного цеха.
При поточном производстве используются различные транспортные устройства:
- рольганги, склизы, скаты, желоба;
- рельсовые и безрельсовые тележки;
- рельсовые тележки, соединенные между собой с приводом от электродвигателя;
- ленточные, пластинчатые и подвесные конвейеры;
- рельсовые пути для перемещения машины на своих колесах;
- подвесные однорельсовые пути;
- карусельные столы и т.п.
Конвейер выполняет не только транспортную функцию, но и функцию регулятора ритма производства: формирует условия для роста производительности труда и сокращения длительности производства.
4.2 Классификация поточных линий.
Разновидность поточных линий определяется сочетанием классификационных признаков, приведенных в табл.1.
Анализ признаков, формирующих разновидности поточных линий показывает, что их разнообразие довольно велико. Однако все разновидности поточных линий по совокупности их важнейших признаков можно свести к четырем основным типам.
Тип I – одно-предметная непрерывно-поточная линия (ОНПЛ). На ней обрабатываются или собираются предметы одного наименования. Процесс полностью синхронизирован. Такая линия характерна в условиях массового и крупносерийного производства в основном для сборочных цехов.
Тип II – одно-предметная прерывно-поточная линия (ОППЛ). Создается для обработки предмета одного наименования, техпроцесс которого характеризуется несинхронностью операций. Это обуславливает прерывность загрузки оборудования и рабочих, а следовательно, образование межоперационных заделов. Такая линия характерна для обрабатывающих цехов массового и крупносерийного производства.
Тип III – многопредметная непрерывно-поточная линия (МНПЛ). Создается для изготовления конструктивно и технологически подобных предметов несколько наименований. Процесс при изготовлении каждого предмета непрерывно-поточный. Такая линия характерна для сборочных цехов серийного и мелкосерийного производства.
Тип IY – многопредметная прерывно-поточная линия (МППЛ). На ней также обрабатываются предметы нескольких наименований. Процесс обработки предмета каждого наименования прерывно-поточный. Этот тип линий характерен для обрабатывающих цехов серийного и мелкосерийного производства.
4.3 Расчет такта производства и выбор вида движения конвейера
Средний такт производства является исходным параметром для проектирования линии:
τ= Тфл /N, ч;
где: Тфл - действительный годовой фонд времени линии, ч.;
N – годовая производственная программа, шт.
Действительный годовой фонд времени линии определяется по формуле:
Тфл = [365 – (104 + 8 )] tсм y ήо ч.;
где: tсм - продолжительность рабочей смены, ч.;
I - число смен работы линии;
ήo - коэффициент использования оборудования линии по времени.
На поточных линиях, где выполняется вредная или напряженная работа при расчете Тфл учитывается время на регламентированные перерывы для отдыха рабочих:
tпер = (0,10 ÷ 0,12) tсм;
При работе на конвейере пульсирующего действия наряду с тактом производства рассчитывается такт сборки τсб , который меньше такта производства τ на время рабочего хода конвейера, при котором сборка не осуществляется:
τсб = τ - (А + l )/60Vk ,ч.
где: А – габаритная длина собираемого изделия, м;
l - расстояние между изделиями на конвейере, принимаемое равным 1,0 ÷ 1,5 м в зависимости от габаритов собираемого изделия;
Vk - скорость движения конвейера, м/мин.
Скорость непрерывно движущего конвейера не рассчитывают, а принимают, исходя из требований техники безопасности в пределах 5 – 8 м/мин.
4.4 Синхронизация операций на ОНПЛ
Синхронизацией операций называется процесс согласования длительности операций с тактом производства или сборки. Задача синхронизации операций является оптимизационной задачей, которая формируется и решается следующим образом.
1. Техпроцесс сборки расчленяется на отдельные переходы (чем меньше такт, тем выше степень членения).
2. Для каждого перехода выбирается необходимое оборудование, инструмент, приспособления.
3. Определяется норма времени каждого перехода.
4. Определяются отношения предшествования для каждого перехода в соответствии с графом технологической последовательности сборки.
5. Определяется позиция, в которой выполняется каждый переход (с левой, правой стороны конвейера и т.п.).
6. Формируются операции, т.е. переходы приписываются к рабочим местам таким образом, чтобы:
а) каждый переход выполнялся только на одном рабочем месте;
б) продолжительность каждой операции не превышала такта конвейера;
в) условия предшествования не были нарушены;
г) каждая операция выполнялась только в одной или нескольких допустимых позициях;
д) потери рабочего времени были минимальны.
Для оценки эффективности синхронизации пользуются коэффициентом использования рабочего времени:
η = Т /τR;
где: Т – суммарная трудоемкость сборки изделия, чел-ч.;
τ- такт конвейера, ч.;
R – число работающих на конвейере.
Поставленная задача относится к классу комбинаторных задач целочисленного программирования.
Введем следующие обозначения:
i и j – индексы переходов;
i = 1,2,…m;
j = 1,2,…n;
отношение предшествования, заданных на множестве переходов (i,j – выполнение перехода i предшествует выполнению перехода j);
ti - трудоемкость i -го периода;
Р – положительное целое число (различным позициям соответствуют различные целые числа);
τ - такт конвейера, в большинстве случаев ti ≤τ для всех ί;
ѕ - порядковый номер операции или рабочего места, ѕ= 1,2,…Ѕ.
Введем также целочисленную переменную δīś:
δίš = 1, если ί-й переход закреплен за ś-м рабочим местом;
δίš = 0, если ί-й переход на ś-м рабочем месте не выполняется.
Целевой функцией или критерием оптимальности распределения переходов по операциям является минимум потерь рабочего времени, т.е.:
m
Σ (τ – Σti δis ) → min;
i=1 s
Но Σti δis = Ts , где Тs – трудоемкость S-й операции, а также ΣТS = Т, i=1 S=1
где Т - суммарная трудоемкость сборки изделия, то целевая функция получает следующее выражение:
(τЅ- Т) → min;
т.е. синхронизация операций сводится к минимизации числа операций (рабочих мест):
Ѕ→min,
при следующих ограничениях, учитывающих требования пунктов:
S
а)* Σδis = 1 – каждый переход выполняется на одном рабочем месте;
S=1
m
б)* Σti δis ≤τ – не превышение продолжительностью каждой операции такта i=1ь конвейера;
S
в)* δjs ≤ Σδik - соблюдение условий предшествования для каждой пары i и j
k=1
при i j;
г)* Рi - Pjδis + Pi – Pjδjs≤ Pi - Pj - условия выполнения операции в одной позиции. В самом деле, если δis=1 и δjs=1, т.е. переходы выполняются на одном рабочем месте, то данное условие соблюдается лишь при Рi = Рj , что означает выполнение переходов i и j в одной и той же позиции.
Целевая функция и ограничения составляют математическую модель задачи синхронизации операций на сборочном конвейере. Аналитического решения указанной задачи пока не найдено; существуют лишь эвристические процедуры перебора, дающие с удовлетворительной для практических целей точностью приближенные результаты.
В рассматриваемом алгоритме решения поставленной задачи в качестве трудоемкости перехода берется величина:
ti = ti – ] ti/τ [,
где:] ti/τ [ – антье (целая часть числа).
4.5 Алгоритм методики формирования операций при их синхронизации
В рассматриваемом алгоритме сборочные операции формируются последовательно, начиная с первой.
На каждом шаге в формируемую операцию включается только один переход. Из множество переходов отбираются такие, которые на очередном шаге не имеют предшественников (предположим, что их предшественники уже включены в предыдущие или формируемую операцию).
Подмножество переходов, которые можно включить на ν –м шаге в формируемую операцию, не нарушая условия предшествования, называется u -допустимым подмножеством и обозначаются Du .
Пусть формируемая операция s должна выполняться в позиции Р. Тогда из u -допустимого подмножества следует отобрать переходы, имеющие позиционный код Р. Они образуют р – допускаемое подмножество (обозначаемое Dp), которое, как правило, содержит меньшее число переходов, чем u-допустимое подмножество, за счет наложения позиционных ограничений.
Третье налагаемое условие – не превышение продолжительностью операции такта конвейера – еще более ограничивает число переходов, которые на ν-м шаге можно включить в s.
Отбирая из числа р – допустимых переходы, удовлетворяющие условию:
ti ≤ τ- Tsν-1;
получим, наконец, t –допустимое подмножество Dt. Здесь:
ti – трудоемкость i –го перехода;
τ - такт конвейера;
T3ν-1 суммарная трудоемкость переходов, уже назначенных в s к моменту ν.
Так последовательно отбирая u –допустимые, р - допустимые и t – допустимые подмножества, на каждом ν –м шаге будем иметь совокупность переходов, которые в момент ν можно назначить в операцию s.
При этом возможны три ситуации:
1. На ν-м шаге t – допустимые подмножества является пустым (Dt =Ф), т.е. к моменту ν переходы, удовлетворяющие всем трем условиям, отсутствуют. В этом случае формирование операции s закончено, и переходят к формированию следующей операции (s +1)-й.
2. На ν-м шаге t -допустимое подмножество содержит один переход. Тогда он назначался в операцию s, и переходят к (ν+1)-му шагу ее формирования.
3. На ν-м шаге t – допустимое подмножество содержит несколько переходов.
4. В этом случае из Dt выбирают переход в соответствии с некоторым приоритетным правилом. Наиболее распространены следующие правила выбора переходов:
- равновероятный выбор;
- выбор перехода с минимальной длительностью выполнения;
- выбор перехода с максимальной длительностью выполнения;
- выбор перехода, для которого максимальна или минимальна длительность выполнения всех следующих за ним переходов;
- выбор перехода, для которого максимально число всех следующих за ним переходов;
- выбор перехода, для которого максимально отношение длительности выполнения всех следующих за ним переходов к длительности его выполнения;
- рандомизированный, но не равновероятный выбор: переход выбирается с заранее заданной вероятностью по одному из вышеуказанных правил, т.е. каждое правило имеет свой «вес».
При наличии двух и более переходов, имеющих одинаковую степень приоритета, выбирается переход с меньшим порядковым номером.
Использование различных приоритетных правил приводят, вообще говоря, к разным решениям задачи синхронизации операций. Однако нельзя указать какое – либо одно универсальное правило, приходящее всегда к наилучшему решению. Результат, полученный при использовании того или иного правила, зависят от особенностей техпроцесса, операции которого синхронизируются.
4.6 Пример
Условие: синхронизировать операции техпроцесса сборки, представленного графом на рис.1 и таблицей исходных данных, при такте конвейера τ=10 мин.
Особенности задачи:
В данном примере имеется две группы позиционных ограничений. Первая группа (Р) характеризует переходы, которые нельзя выполнять на одном рабочем месте, если они имеют разные коды, например, ограничения по профессии исполнителя: код 1 – слесарь-сборщик, код 2 – сварщик.
Ограничения второй группы (Р) также не допускают выполнения на одном рабочем месте переходов с разными ненулевыми кодами, но при этом переходы с кодами Р=0 совместимы с любыми другими (по группе Р), например: код 1 – левая сторона конвейера; код 2 – правая сторона конвейера; код 0 – возможность выполнения перехода на любой стороне конвейера.
Т.о. каждому переходу приписана пара кодов (Р,Р) и наличие позиционных ограничений равносильно требованию: любая операция может содержать только те переходы, которые имеют одинаковые пары кодов.
Совмещение переходов, например: u1 ,u2 ,u3 ; имеющих пары кодов (1,0),(1,1) и (1,0)не нарушает позиционных ограничений, также как и объединение в какой-то другой операции переходов u4 ,u6 ,u11 (пары кодов 2,0; 2,2; 2,0). Нельзя объединять в одну операцию такие переходы, как u6 , u7 ; u2 ,u7 ; подмножество. Оно также включает только переход u1 , т.е. Dto = u1 .
3. Назначаем переход u1 в первую операцию и фиксируем, что Р=1, ибо u1 приписана пара кодов (1,0).
4. Заполним графу z1 таблицы 2, имея в виду, что назначение в первую т.к. запрещено совмещение пар кодов 2,2 и 1,2, а также 1,1 и 1,2.
В рассматриваемом примере будем использовать приоритет по максимальной длительности выполнения перехода.
Решение.
1. Заполним графу zo таблицы u-допустимых подмножеств, для чего против каждого перехода проставим количество предшественников, которое он имеет в начальный момент формирования первой операции.
2.Заметим, что в начальный момент формирования первой операции только переход u1 является u-допустимым, т.е. Duo= {u1}. Т.к. коды позиционных ограничений для первой операции еще не установлены, определим сразу t-допустимое операцию перехода u1 , бывшего предшественником переходов u2 u3 ,u4 ,u5 делает их доступными для выполнения. По графеz1 находим Du1 = {u2 u3 u4 u5 }.
5.Значение второго кода позиционных ограничений Р пока не установлено, поэтому отбираем в Р-допустимое подмножество переходы, совместимые с u1 по первому коду, т.е.D1,p(1) = u2 , u3 . Переходы u4 ,u5 , имеющие код Р = 2, не являются р-допустимыми, т.к. в позиции с кодом Р = 1.
6. Определяем t-допустимое подмножество Dt(1) = u2 . Переход u3 не является t-допустимым, т.к. при его назначении в первую операцию вместе с уже назначенным переходом u1 суммарная продолжительность выполнения операции составит 11 мин, что превышает такт конвейера.
7. Назначаем в первую операцию u2 и устанавливаем, что P = 1. Следовательно, теперь в первую очередь можно включать только переходы, имеющие коды позиционных ограничений 1,0 или 1,1 , а код 1,2 является запрещенным.
8. С помощью z2 находим Du(2)=u3 u4 u5 u6 , а затем D1,1(2)=u3 ; D(2)t =Ф. Формирование первой операции закончено: Ώ1 = u1, u2.
Аналогично формируется вторая операция. Из графы z2 следует, что Du(2)=u3u4u5u6 . Коды Р и Р для второй операции пока не установлены, поэтому определяем D(2)t= u3u4u5u6 .
Находим max t3t4t5t6 , выбираем u4 и фиксируем Р=2. По графе z3 определяем Du(3)=u3u5u6 , а затем D2,0(3)=u5u6 . Dt(3)=u5u6 , max t5t6 .
Выбираем u6 и замечаем, что P=2. Определяем Du(4)=u3u5u8 , D2,2(4)=u5 . Dt(4)=u5 и выбираем u5. Далее определяем Du(5)=u3u8 , D2,2(5)=Ф и Dt(5)=Ф. Формирование второй операции закончено, Ώ2= u4u5u6 .
Продолжив вычисления, определим Ώ3=u8 , Ώ4=u3u7 , Ώ5=u9u10 , Ώ6=u11 .
Коэффициент использования рабочего времени 0,83.
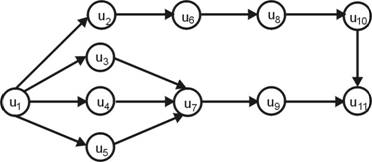
Рис.4.1. Граф технологической последовательности сборки изделия
Табл.4.2.
Исходные данные к расчету
|
N перехода |
ti , мин. |
p |
~ p |
Предшественники |
|
u1 |
6 | 1 | 0 | |
|
u2 |
2 | 1 | 1 |
u1 |
|
u3 |
5 | 1 | 0 |
u1 |
|
u4 |
7 | 2 | 0 |
u1 |
|
u5 |
1 | 2 | 2 |
u1 |
|
u6 |
2 | 2 | 2 |
u2 |
|
u7 |
3 | 1 | 2 |
u3, u4, u5 |
|
u8 |
6 | 1 | 1 |
u6 |
|
u9 |
5 | 2 | 0 |
u7 |
|
u10 |
5 | 2 | 0 |
u8 |
|
u11 |
8 | 2 | 0 |
u9, u10 |
Табл.4.3.
Таблица u-допустимых подмножеств
|
Z0 |
Z1 |
Z2 |
Z3 |
Z4 |
Z5 |
Z6 |
Z7 |
Z8 |
Z9 |
Z10 |
Z11 |
|
|
u1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
u2 |
1 | 0 | ||||||||||
|
u3 |
1 | 0 | 0 | 0 | 0 | 0 | 0 | |||||
|
u4 |
1 | 0 | 0 | |||||||||
|
u5 |
1 | 0 | 0 | 0 | 0 | |||||||
|
u6 |
1 | 1 | 0 | 0 | ||||||||
|
u7 |
3 | 3 | 3 | 2 | 2 | 1 | 1 | 0 | ||||
|
u8 |
1 | 1 | 1 | 1 | 0 | 0 | ||||||
|
u9 |
1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | |||
|
u10 |
1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
|
|
|
u11 |
2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 1 | 0 |
Табл.4.1.
Классификация поточных линий
| Классификационные признаки | Разновидности поточных линий | |||||||
| 1. Уровень механизации и автоматизации | Немеханизированное | Механизированное | Автоматическое | |||||
| 2. Номенклатура закрепленных изделий и порядок их чередования | одно-предметные | Многопредметные | ||||||
| Предметно-поточные | ||||||||
| Без переходящих заделов | С переходящими заделами | Партионно-групповые | Комплектно-групповые | |||||
| 3. Непрерывность производственного процесса | Непрерывно-поточные | Прерывно-поточные | ||||||
| 4. Характер движения изделий | Регламентированный | Полусвободный | Свободный | |||||
| 5. Характер работы конвейера | Непрерывный | Прерывный (пульсирующий) | ||||||
| 6. Характер перемещения изделий и рабочих | Подвижный объект | Неподвижный объект | Комбинация перехода рабочих и перемещения объекта | |||||
| 7. Характер передачи изделий | Поштучная передача | Передача транспортными партиями | ||||||
| 8. Размещение линии в пространстве | Прямые | Замкнутые | ||||||
5 АНАЛИТИЧЕСКИЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ПОТРЕБНОСТИ В РЕМОНТАХ
Потребность автомобилей в ремонте определяется при помощи интегральных методов, основанных на использовании некоторых общих характеристик надежности и интенсивности, без учета т/с каждого отдельного автомобиля. Наиболее распространены детерминированные и вероятные методы.
При пользовании детерминированными методами потребное количество КР автомобилей Nкр определяют по формуле:
Nкр = Na kp ;
где: Na - списочный состав обслуживаемых автомобилей;
kp - годовой коэффициент охвата капитальным ремонтом автомобилей, узлов или деталей.
Коэффициент охвата капитальным ремонтом kp показывает долю автомобилей, агрегатов, узлов или деталей, проходящих КР в течение года:
kp = l год / lмр ;
где: lгод - среднегодовой пробег а/м, тыс.км;
lмр - межремонтный пробег а/м после КР, тыс.км.
Фактическое значение коэффициента меньше расчетного, т.к. указанная формула не учитывает ежегодного списания изношенных и постановок новых автомобилей, значительное отличие доремонтных и межремонтных пробегов, а также случайный характер постановки автомобилей в ремонт. Более точно коэффициент kp определяют с учетом того, что часть автомобилей, подлежащих списанию, не будут ремонтировать:
kp1 = (lам /lc – 1): Тс ;
где: Тс – амортизационный срок службы а/м, годы;
lам - пробег а/м за срок Тс , тыс.км;
lc - средний межремонтный пробег, тыс.км.
lc = (ld + lм )/2;
где: ld - пробег а/м до первого КР;
lм - межремонтный пробег а/м.
Результатом детерминированного подхода к определению потребности парка автомобилей в КР является, как правило, искажение величины потребности, особенно для парков, в которых преобладают новые или, наоборот, прошедшие КР автомобили.
Вероятный метод расчета, основанный на теории восстановления, в значительной мере лишен этих недостатков. Суть ее заключается в следующем.
Парк автомобилей рассматривается как однородная система, элементы которой (а/м, агрегаты, детали и т.д.) могут выходить из строя в различные случайные моменты времени. Моменты отказов (моменты восстановления, т.к. tэкспл>> tвосст ) образуют случайный поток отказов, называемый простым процессом восстановления.
функция распределения длительности безотказной работы F(t) за время t:
t
F(t) = ∫ f(t)dt ;
0
где: f(t) = dF(t) / dt – плотность распределения длительности безотказной работы. Математическое ожидание числа отказов элемента (автомобиля) за время от начала эксплуатации to =0 до момента t называется функцией восстановления Ф(t):
t
Ф(t) = ∫φ (t)dt;
0
где: φ(t) = dФ(t)/ dt – плотность восстановления.
Значение φ(t) выражает среднее число восстановления (ремонтов или замен) элемента в единицу времени в момент t.
Т.о. интегральной функцией (уравнением) восстановления будет выражение:
t
φ(t) =f(t) + ∫f(t-τ)φ(τ)dτ;
0
где время τ определяется из условия того, что длительность безотказной работы элемента τ не превышает величины t.
Рассмотрим случай, когда все межремонтные пробеги автомобиля имеют одинаковые распределения, но отличаются от ремонтных, т.е. Имеет место не простой, а общий процесс восстановления.
Пусть f(t) есть плотность распределения доремонтных пробегов автомобиля, а g(t) - межремонтных. Тогда плотность восстановления элемента h(t) для рассматривания случая общего процесса восстановления:
t
h(t) = f(t) + ∫g(t-τ)h(τ)dτ;
0
Т.о. функции восстановления для простого Ф(t) или общего Н(t) процесса могут быть получены интегрированием φ(t) или h(t):
t
Ф(t) =∫ φ(t)dt;
0
t
H(t)=∫h(t)dt;
0
Или непосредственно через функции распределения для простого и общего ПВ:
t
Ф(t) =F(t) + ∫Ф (t-τ )f( τ)d τ;
0
t
H(t) =F(t) + ∫ H(t-τ )g(τ )dτ;
0
На рис.1 приведены графики указанных выше функций. Характерной особенностью функций φ(t) и H(t) является их колеблемость с постепенным переходом к постоянному значению, равному обратной величине среднего срока службы между отказами Тм (среднего значения межремонтного срока службы). Функции же Ф(t) и Н(t) со временем становятся линейными.
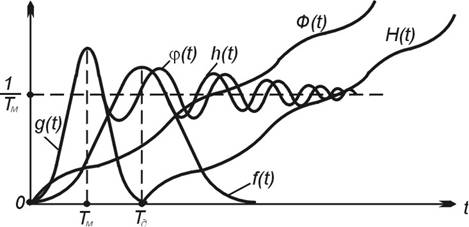
Рис.5.1. График функций, описывающих процесс восстановления элемента
Число ремонтов за время t является случайной величиной, поэтому приведенные выше уравнения описывают поведение средних значений плотностей и функций восстановления. Фактические же значения в каждый момент времени имеют некоторое рассеивание, характеризующееся дисперсией D(t).
Для простого процесса восстановления:
t
D(t) =Ф(t) – Ф2(t) +2∫ Ф(t-τ)dФ(τ);
0
Для общего случая:
t
D(t) = H(t) – H2(t) + ∫ H(t-τ)dH(τ).
0
6 ПРОЕКТИРОВАНИЕ АВТОРЕМОНТНЫХ ПРЕДПРИЯТИЙ
6.1 Структура АРП и его компоновка
Основное производство АРП может быть построено по бесцеховой и цеховой структуре.
При бесцеховой структуре все отдельные производственные участки возглавляются мастерами и подчинены непосредственно руководству АРП, а все административные функции выполняются заводоуправлением. Такая структура управления предприятием позволяет упростить организацию производства, сократить количество административно-управленческого персонала, что в конечном итоге ведет к удешевлению производства.
При цеховой структуре отдельные участки объединены в самостоятельные адмистративные (часто хозрасчетные) единицы, возглавляемые начальниками цехов. При этом в каждом цехе предусматривается определенный объем работ, обеспечивающий загрузку производственных рабочих в количестве не менее 100 человек.
При цеховой структуре основные цехи АРП образуются или по технологическому, или предметному принципу (по замкнутому циклу производства).
При построении структуры по технологическому принципу в каждом цехе выполняют одноразовые работы, например, разборку, сборку, механические, гальванические работы и т.п.
При построении цехов по предметному принципу, в каждом цехе ремонтируют одно изделие или комплект, например, кузова, эл. оборудование, двигатели, агрегаты, шины и др. В таком цехе выполняют все работы по ремонту изделия: разборку, мойку, восстановление деталей, сборку и окраску, за исключением кузнечных, термических и гальванических работ, которые в ремонте каждого агрегата занимают незначительный удельный вес.
На специализированных АРП, потребляющих и ремонтирующих ограниченную номенклатуру деталей (запчастей и материалов) бесцеховая структура может быть применена и на более крупных предприятиях, чем на рис.1.
При компоновке АРП необходимо с учетом техпроцесса ремонта автомобиля разрабатывают принципиальную схему производственного процесса, т.е. форму организации потока разборки – сборки автомобиля (агрегата).
Существуют три принципиальные схемы:
1. Прямой поток;
2. Г – образный поток;
3. П – образный поток;

 Прямой
поток
Прямой
поток
Участок восстановленных деталей |
|||
| Участок ремонта двигателей и агрегатов | |||
Моечный участок |
Разборочный участок |
Сборочный участок |
|
| Участок ремонта кузовов и кабин. | |||
Достоинства:
- простота организации;
Недостатки:
- большая длина (вытянутость) площадей сопутствующих процессов;
- невозможность изоляции разборочно-моечных участков.
Г – образный поток
Разборочно-моеч- |
Участки |
|
|||
| ный участок | автомобилей | Участок ремонта двигателей и агрегатов | восстановления |
|
|
| Участок ремонта кузовов и кабин | Участок сборки | ||||
| деталей | |||||
![]()
Достоинства:
- минимальные пути транспортирования деталей и агрегатов;
- возможна изоляция разборочно-моечного участка;
- меньшая длина производственного корпуса.
Недостатки:
- непрямолинейные перемещения базовых деталей (рамы и кузова).
П – образный поток
| Сборочный участок |
Разборочный |
участок | Участок восстановления двигателей | ||
| автомобилей | Участок | Моечный | |||
| Участок ремонта двигателей и агрегатов | |||||
| Участок ремонта кузовов и кабин | |||||
![]()
![]()
Достоинства:
- тоже, что и у Г - образного.
Недостатки:
- пересечение разборочно-моечного участка потоком деталей, движущихся на восстановление и обратно.
Выполняя компоновку производственного корпуса, необходимо учитывать следующие основные положения:
1. Все производственные цеха и участки целесообразно размещать в одном здании (производственном корпусе), т.к. затраты на строительство в этом случае будут значительно ниже, чем при строительстве отдельных зданий.
2. Производственные корпуса АРП строят, как правило, одноэтажными, многопролетными.
3. Производственное здание должно иметь проектные очертания плана и разрезов без случайных пристроек и надстроек с максимальной унификацией пролетов, шага колонн и высоты помещений.
4. Периметр здания ПК при заданной площади должен быть наименьшим, т.к. это сокращает расходы на возведение наружных стен, отопления и т.п. С этой точки зрения целесообразно стремиться получить здание квадратной формы или близкой к ней.
5. Взаимное расположение участков должно обеспечивать прямо точность производственного процесса (без встречных грузопотоков) согласно принятой схеме.
6. Длина пути транспортирования агрегатов и корпусных тяжелых деталей должна быть как можно меньшей.
7. Производственные участки могут занимать один или несколько пролетов, а также часть пролета. При этом их не рекомендуется отделять друг от друга перегородками, если это не диктуется условиями выполнения технологии, требованиями ТБ или ПБ. Участки, опасные в пожарном отношении (сварочный, кузнечно-прессовый, термический, деревоотделочный, малярный, испытательная станция, восстановления деталей синтетическими материалами), должны быть отделены от других помещений огнестойкими стенами. Помещение отделяемые перегородками, целесообразно размещать у наружных стен здания, т.к. это облегчает выполнение перегородок и вентиляционных устройств.
8. В здании ПК рекомендуется предусматривать несколько взаимно-перпендикулярных проездов, которые часто являются так же границами цехов и участков.
Изменение структуры основных производственных участков в зависимости от мощности предприятия
| Элементы процесса |
I |
II |
III |
IV |
V |
VI |
VII |
|||
| Разборка а/м и агрегатов, мойка и к-ль сортировка деталей и комплектация | Сборка, регулировка агрегатов, автомобилей, ремонт рамы и монтаж шин | Сборка двигателей, КПП и ремонт базовых деталей | Ремонт кузовов, кабин, оперения и радиаторов | Ремонт электро-оборудования, топливного аппарата и тормозных систем | Ремонт деталей | Изготовление деталей | ||||
| Мощность авторемонтных предприятий Nкр. | До 1000 |
На всех участках производства – бесцеховая структура |
||||||||
| 2000 |
Цех разборочно-сборочный и кузовной |
Цех восстановления и изготовления деталей | ||||||||
| 4000 |
Разборочно-сборочный цех |
Кузовной цех | Участок ремонта электро- оборудования | Цех восстановления и изготовления деталей | ||||||
| 6000 | Разборочно-комплектовочный цех | Цех сборки агрегатов и а/м | Участок сборки двигателей | Кузовной цех | Участок ремонта электро- оборудования | Цех восстановления и изготовления деталей | ||||
| 8000 | Разборочно-комплектовочный цех | Цех сборки агрегатов и а/м | Цех сборки дв-лей и КПП | Кузовной цех | Участок ремонта электро- оборудования | Цех восстановления деталей | Цех изготовления деталей | |||
| 10000 | Разборочно-комплектовочный цех | Цех сборки агрегатов и а/м | Цех сборки дв-лей и КПП | Кузовной цех | Участок ремонта электро- оборудования | Цех восстановления деталей | Цех изготовления деталей | |||
Желательно все проезды делать сквозными. Один или два сквозных проезда должны быть расположены против выездных или въездных ворот. При такой компоновке производственные участки получают форму прямоугольников.
6.2 Нормы строительного проектирования
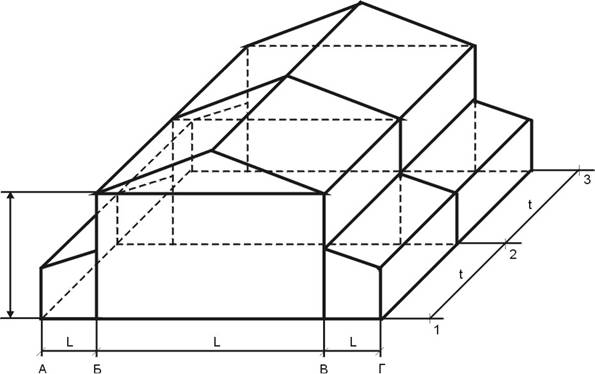
Рис.6.2. Общая компоновка производственного корпуса
Шагом колонны t называют расстояние между осями двух смежных колонн одного ряда в направлении, перпендикулярном пролету.
Шаг колонны по крайним или средним рядам следует назначать равным 6 и 12 с учетом технологических требований, за исключением следующих случаев:
- в зданиях с ж/б каркасом, пролетом 12м и высотой до 6м включительно, следует принимать шаг наружных колонн равным 6м;
- в зданиях без кранов, высотой 8,4м и более, оборудованных кранами, следует принимать шаг средних колонн равным 12м.
Пролетом здания L (рис.6.2) называют расстояние между продольными осями двух рядов колонн.
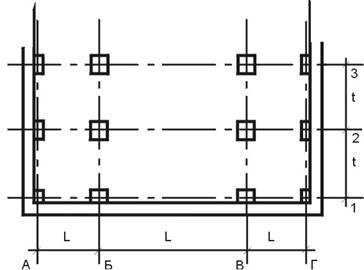
Рис.6.3. Сетка колонн
Размеры пролетов (по СниП 11-М-62):
- для зданий без мостовых кранов – 12, 18, и 24м;
- для зданий с мостовыми кранами – 18, 24, 30м и более, кратным 6м.
Допускается применять пролеты в 6 и 9м.
Если необходимо назначать шаг колонн более 12м, то его следует принимать кратным 6м.
Сетка колонн представляет собой прямоугольник, стороны которого кратным пролету и шагу колонн.
Размеры сетки колонн обозначают в м в виде произведения пролета на шаг колонн (например, 12х6).Таким образом, сетка колонн образуется осевыми линиями, проходящим через середины колонн в плане. Осевые линии в направлении шага обозначают цифрами, а в направлении пролета – буквами.
При проектировании следует принимать по возможности более крупную сетку колонн, т.к. она позволяет более рационально использовать производственную площадь, облегчает реконструкцию цехов при совершенствовании техпроцесса, создает возможности использования прогрессивных строительных конструкций, что снижает трудоемкость строительства.
Рациональной для АРЗ считается сетка: 18х12;18х6;12х6.
Высота помещения Н называется расстояние от уровня пола до низа несущих конструкций покрытия.
6.3 Общая схема производственного процесса ремонта автомобилей
Производственным процессом ремонта называется вся совокупность действий, осуществляемых с момента поступления объекта ремонта на предприятие до получения полностью отремонтированной продукции.
Организация производственного процесса предусматривает размещения цехов и участков производства, распределение процесса между отдельными цехами, участками и рабочими местами. Она находит выражение в пространстве и во времени:
- в пространстве – это построение производственной структуры предприятия и его планировка;
- во времени – это обеспечение между цехами, участками и рабочими местами пропорций по производительности и создание межоперационных заделов, обеспечивающих непрерывную ритмичную работу АРП.
Основной характеристикой эффективности производственного процесса ремонта является длительность производственного цикла – Тцп – это период времени от запуска автомобиля в ремонт до выхода его из ремонта:
k R
Тцп = ∑Тk + ∑Тr ;
k=1 r=1
где: Тk – длительность k-х видов ремонтных работ с учетом параллельности их выполнения;
Тr – длительность r- х перерывов в рабочее и нерабочее время.
Часть производственного цикла, непосредственно связанная с последовательным качественным изменением состояния объекта ремонта, называется технологическим циклом.
Тцп = Тцтkпер или Тцт = Тцп/kпер ;
где: kпер – коэффициент перехода, учитывающий увеличение Тцп по сравнению с Тцт на время ожидания ремонта, транспортирования предметов труда, контроля и т. д.
На рис. 6.4 представлен линейный график технологического цикла ремонта автомобиля на АРЗ. Его анализ позволяет выразить длительность технологического цикла следующим равенством:
K1 L пер. K L
Тцт =∑∑( tkl/ mkl) +∑∑ (tkl/mkl);
k=1 l=1 max k=1 l=1
где: tkl – трудоемкость выполнения k-го вида работ по l-му агрегату;
mkl – число рабочих, занятых выполнением k-го вида работ по l-му агрегату;
k1 – количество перекрываемых видов работ.
пер.
(tkl / mkl ) – максимальная продолжительность
max
из перекрываемых k-х видов работ по l-му агрегату.
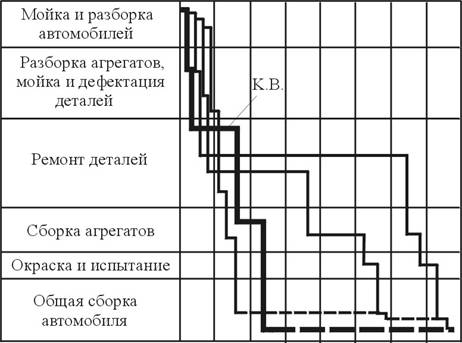
Рис.6.4. Линейный график технологического цикла ремонта автомобиля
7 ТЕХНОЛОГИЧЕСКИЙ РАСЧЕТ АРП
7.1 Общие положения
В зависимости от стадий проектирования и масштабов производства принимают два метода проектирования:
- по укрупненным показателям;
- по материалам технологических процессов
При проектировании по укрупненным показателям принимают минимальную дифференциацию распределения трудовых затрат (например, в разборочных работах выделяют только подразборку и общую разборку, в слесарно-механических – станочные и слесарные работы и т.д.). Так разрабатывают проекты АРП с мелкосерийным масштабом производства. Проекты АРП с крупносерийным и массовым масштабом производства, особенно специализированных АРП разрабатываются по материалам технологических процессов.
Большинство расчетных формул в технологической части проекта приводится в детерминированной зависимости, что упрощает выполнение расчетов. Однако большинство расчетных формул с достаточной степенью достоверности может быть определено с помощью математического моделирования, что позволяет с большой степенью точности учесть влияние всевозможных факторов, обуславливающих эффективность проектируемого АРП.
7.2 Годовая программа и режим работы предприятия
В задании на проектирование годовую программу определяют в физическом выражении с указанием всей товарной номенклатуры продукции (программа по изготовленным деталям – в денежном выражении). Программу обычно приводят к модели ремонтируемого автомобиля или комплекта агрегатов, имеющих наибольший удельный вес в задании на проектирование. В этом случае годовая программа выражается в приведенных (условных) ремонтах определенной модели автомобиля или комплекта агрегатов.
Приведение заданной программы к расчетной производят по коэффициентам приведения. Коэффициент приведения – это частное от деления трудоемкости, затрачиваемой на приводимые изделия на трудоемкость, затраченную на изделие, к которому приводится программа (при равных программах ремонта).
Например: определим приведенную годовую программу завода по ремонту полнокомплектных автомобилей на силовых агрегатах, поставляемых по кооперации. Заданные программы ремонта:
1. КР а/м ЗИЛ-130 N1 = 3200 ед.
2. КР а/м ЗИЛ – ММЗ – 555 N2 =1400 ед.
3. КР комплектов товарных агрегатов ЗИЛ-130 N3 = 6000комплектов;
Решение: Nпр.год.= N1+ N2(К1(2)/К1(1)) + N3(Ка(3)/Ка(1) ;
где: К1(2) – коэффициент приведения КР а/м ЗИЛ-ММЗ-555 к КР а/м ГАЗ-53;
К1(2) =1,28.
К1(1) – коэффициент приведения КР а/м ЗИЛ-130 к КР а/м ГАЗ-53;
К1(1) =1,13.
Ка(3) – коэффициент приведения КР комплекта агрегатов а/м ЗИЛ-130 к КР полнокомплектного а/м;
Ка(3) =0,160.
Ка(1) – коэффициент приведения КР комплекта агрегатов а/м ЗИЛ-130 (без силового агрегата) к КР полнокомплектного а/м;
Ка(1) = Ка – Ка(сил).
Ка – суммарный коэффициент приведения КР агрегатов к КР полнокомплектного а/м;
Ка=1,0.
Ка(сил)- коэффициент приведения КР силового агрегата ЗИЛ-130 к КР полнокомплектного а/м;
Ка(сил) =0,2867.
Тогда: Nпр.год = 3200+1400(1,28/1,13)+6000(0,160/(1,0-0,2867))=6130 ремонтов в год.
Режим работы АРП определяется количеством рабочих дней в году, продолжительностью в часах рабочей недели и смены, и количеством смен. Все составляющие режима работы, кроме количества смен, определяется трудовым законодательством. При проектировании АРП, как правило, предусматривается двухсменная работа.
7.3 Годовые фонды времени
Они устанавливаются для рабочего оборудования и рабочего места и подразделяются на номинальные и действительные.
Номинальный ГФВ рабочего определяется количеством рабочих дней в году и продолжительностью рабочих недель (таб.7.1).
Действительный ГФВ рабочего Тфд определяется как разность номинального ГФВ и величины неизбежных потерь рабочего времени:
Таблица 7.1.
Номинальный годовой фонд времени рабочего
| Исходные данные |
Нормальные условия труда |
Вредные условия труда |
||
| 5-дневная неделя | 6-дневная неделя | 5-дневная неделя | 6-дневная неделя | |
| 1. Продолжительность рабочей недели, ч. | 41 | 36 | ||
| 2. Продолжительность смены, ч. | 8,2 | 8 | 7,2 | 7 |
| 3. Количество календарных дней в году | 365 | 365 | ||
| 4. Количество рабочих дней в году. | 253 | 260 | 253 | 260 |
| 5. Количество праздничных дней в году. | 8 | 8 | ||
| 6. Количество дней отдыха. | 104 | 97 | 104 | 97 |
| 7. Количество сокращенных дней в году. | 6 | 6 | ||
| 8. Номинальный годовой фонд времени. | 2070 | 1830 | ||
Тфд = Тфн – Тп;
Неизбежные потери учитывают продолжительность профессиональных отпусков, учетных отпусков, отпусков по болезни и т.д.
Номинальный ГФВ оборудования определяется аналогично номинальному ГФВ рабочего, но с учетом сменности работы оборудования.
Действительный ГФВ оборудования – определяется с учетом простоев оборудования в планово-предупредительном ремонте, выполняемом в рабочее время:
Тфод = Тфон(1 –ηпо) ;
где: ηпо – коэффициент, учитывающий потери времени на ремонт оборудования. В зависимости от типа оборудования и количества смен его работы ηпо принимает значения ηпо =(0,02 – 0,10).
7.4 Трудоемкость объектов ремонта
Она определяется:
а). при проектировании АРП, по укрупненным показателям – по сл. формуле:
t = k1k2k3k4tэ ;
где: k1…k4 – коэффициенты приведения, учитывающие:
k1 - конструктивно-технологические особенности объекта ремонта (модель а/м или агрегата);
k2 – масштаб производства (годовую программу АРП);
k3 – количество ремонтируемых на АРП моделей агрегатов , а/м ; k3 =1,04–1,07;
k4 – соотношение в программе АРП полнокомплектных а/м и комплектов агрегатов;
б). при проектировании АРП по разработанному техпроцессу общая трудоемкость объекта ремонта и трудоемкости по видам работ определяется суммированием частных трудоемкостей, указанных в исходной технологической документации, т.е. трудозатраты определяют по принципу от частного к целому, а не наоборот, как при проектировании по укрупненным показателям.
7.5. Расчет годового объема работ и состава работающих
7.5.1 Годовой объем работ
Годовой объем работ – это время, необходимое для выполнения годовой производственной программы предприятием, цехом, участком. Обычно он определяется в чел.-час.
Однако на специализированных АРП один человек может обслуживать несколько машин (многостаночное обслуживание), или наоборот – несколько человек могут работать на одной машине (кузнечное, штамповочное производство), поэтому годовой объем работы может быть выражен в станко-часах.
При расчете по укрупненным показателям годовой объем работ рассчитывается по формулам:
m
Тr = ΣtiNr ;
i=1
- для участков, на которые номенклатура и количество технологических операций остаются постоянными для всех объектов ремонта (разборочный, дефектовочный, сборочный, окрасочный и др.);
m
Тr = Σti kp Nr ;
i=1
- для участков, связанных с ремонтом отдельных агрегатов и узлов, часть которых при дефектации отправляется в утиль и заменяется новыми (агрегатный, медницко-радиаторный, ремонта кабин, оперения и т.д.).
Здесь: Nr – годовая программа АРП;
ti - трудоемкость выполнения i –й операции;
m – количество операций;
kp – коэффициент ремонта узла, агрегата.
Для участков восстановления деталей с машинными способами работы годовой объем работ может быть определен только в станко-часах:
l m
Тr = Σ [Σcik (n Nr)]
j=1 i=1
где: ci – станкоемкость i-й операции;
kв – к-т восстановления деталей;
n – количество деталей одного наименования в агрегате или а/м;
l – количество наименований деталей, восстанавливаемых на участке.
7.5.2 Расчет количества производственных рабочих
Различают списочный и явочный состав рабочих.
Списочный – это полный состав рабочих, включающий в себя как фактически являющихся на работу, так и находящихся в отпуске и отсутствующих по прочим уважительным причинам.
xсп = Tг/Тф.д.
где: Тг – годовой объем работ в чел-ч
Тф.д. – действительный ГФВ рабочего, ч.
Явочный – это количество рабочих, являющихся на работу фактически.
xяв = Тг/Тф.н.
где: Тф.н. – номинальный ГФВ рабочего, ч.
Для выполнения технических расчетов АРП используют обычно списочный состав рабочих, который обозначается хр.
Для участков, годовой объем работ которых выражается в станко-часах, количество рабочих хр определяется после расчета количества оборудования по группам и типоразделам оборудования:
ХоТфоkokэ
Хр = ––––––––––– ;
Тфд
где: Хо – количество единиц оборудования;
Тфо – действительный ГФВ оборудования ч;
Тфд – действительный ГФВ рабочего, ч;
ko – коэффициент, учитывающий количество рабочих, обслуживающих единицу оборудования;
kз – коэффициент загрузки оборудования.
Для многостаночного обслуживания ko< 1, а для участков, в которых большинство оборудования обслуживается несколькими рабочими ko >1.
Для участков, годовой объем работ которых не может быть выражен ни в станко-ч., специфика техпроцесса которых предусматривает только наблюдение за его ходом (термические, гальванические и др.), количество рабочих Хр определяется также после расчета оборудования по формуле:
Хр = Хоko.
Здесь ko всегда меньше 1.
7.5.3 Количество вспомогательных рабочих
К вспомогательным рабочим относятся рабочие, не принимающие непосредственного участия в технологических операциях, выполняемых на участке (наладчики, кладовщики, уборщики, транспортные рабочие и т.п.). Их количество принимается в процентном отношении от общего количества производственных рабочих.
Например:
1. Наладчики станков общего назначения – 1 наладчик на 12 – 16 станков.
2. Наладчик токарных полуавтоматов и автоматов – 1 наладчик на 7-10 станков.
3. Наладчики зубообрабатывающих станков – 1 наладчик на 8-12 станков.
4. Распределитель работ на участках восстановления деталей - 2% от количества рабочих на участках.
5. Контролеры - 4-5% от количества производственных рабочих.
6. Кладовщики промскладов – 1 кладовщик в смену на 55-80 станков на участке.
7. Уборщики производственных помещений – 1 уборщик в смену на 1800-2500 м2 площади убираемых помещений.
8. Количество транспортных рабочих определяется на основании анализа схемы организации подъемно-транспортных работ.
7.5.4 Количество ИТР, счетно-конторского персонала (СКП), МОП и пожарно-сторожевой охраны (ПСО)
Их количество определяется в процентном отношении от общего количества производственных и вспомогательных рабочих, например:
ИТР - 17-19 % (в том числе в аппарате управления АРП 10-11 %;
СКП - 5 – 6 % (в том числе в аппарате управления – 4,0 – 4,5 %;
МОП и ПСО - 1 %.
На одного мастера должно приходиться, как правило, 20-25 человек рабочих, а на одного старшего мастера – не менее двух мастеров.
7.6.Расчет количества оборудования и рабочих мест
7.6.1 Методы расчета оборудования
К основному оборудованию относится оборудование, предназначенное для выполнения технологических операций, определяющих функциональное назначение участка (моечный участок – моечные машины и оборудование; испытательная станция – испытательные стенды и т.п.).
Количество основного технологического оборудования определяется расчетом. Исключение составляет случай, когда комплект оборудования подбирается по данным техпроцесса из условий обеспечения выполнения комплекса технологических операций.
Количество единиц производственного инвентаря (верстаки, стеллажи и др.) определяется также без расчета, исходя из организации рабочих мест.
В зависимости от метода, количество оборудования рассчитывается по:
- трудоемкости объектов ремонта;
- станкоемкости объектов ремонта;
- продолжительности технологических операций;
- физическим параметрам (массе, поверхности и т.п.) объектов ремонта.
7.6.2 Расчет оборудования по трудоемкости (станкоемкости) объектов ремонта
Так рассчитывается оборудование, применение которого связано с ручным или машиноручным способом работы (разборочно-сборочное, оборудование для кузовных работ, медницких, жестяницких и др. работ).
Хо = Тг/Тфо ;
где: Тг – годовой объем работ, чел.-ч (станко-ч);
Тфо – действительный ГФВ оборудования, ч.
Из-за небольших размеров партий деталей в АРП возникает необходимость частных переналадок оборудования, поэтому при расчетах оборудования необходимо учитывать затраты времени на переналадочные работы:
Тг + Тгп
Хо = –––––––––
Тфо
где: Тгп – годовой объем переналадочных работ, станко-ч.
7.6.3 Расчет оборудования по продолжительности технологических операций
Так рассчитывается оборудование, при работе на котором трудовые затраты связаны только с загрузкой (установкой) и выгрузкой (снятием) объектов ремонта, а также с периодическим наблюдением за ходом постоянных техпроцессов (моечные ванны, сушильные камеры, испытательные стенды и др.).
Например, количество моечных ванн и сушильных камер (без конвейеров) определяется по следующей формуле:
tто А
Хо = kн_____________
a Tфо
где:t to – продолжительность технологической операции, ч.;
А – количество объектов ремонта на годовую программу, шт.;
а - количество одновременно обрабатываемых объектов ремонта, шт.;
kн – коэффициент неравномерности : kн =1,1 – 1,2;
Количество испытательных стендов:
tToA
Хо = kн kп _____________
Тфо
где: kп – коэффициент повторности, учитывающий необходимость повторных испытаний агрегатов после устранения отдельных дефектов;
kп = 1,1 ÷ 1,5 .
7.6.4 Расчет оборудования по физическим параметрам объектов ремонта
Так рассчитывается оборудование, паспортная производительность которого определяется массой обрабатываемых изделий (термические и нагревательные печи и др.), а также оборудование участков покрытий, в которых продолжительность операций определяется в зависимости от размеров поверхности покрытий изделий (гальванические ванны, окрасочные камеры и др.).
Количество единиц оборудования, рассчитываемого по весовым параметрам объекта ремонта:
Хо = dGN / Tфоg ;
где: N - годовая программа КР;
d - коэффициент, учитывающий время на загрузку и выгрузку изделий;
G -суммарная масса изделий объекта ремонта, подвергающихся данному
виду обработки, тонн/КР;
g - паспортная производительность оборудования, т/ч.
Количество ванн для гальванопокрытий:
m
Σ (F)Nt3
Xo = d–––––––––;
f3 Tфо
где: t 3 - время обработки одной загрузки в ванну, ч.;
f3 - единовременная загрузка ванн (по справочникам), дм2 ;
Время обработки одной загрузки t3
t3 = bγ 60 / cDkήтк (мин);
где: b - толщина слоя покрытия, мкм;
γ- объемная масса металла покрытия, г/см3;
c - электрохимический эквивалент, г/А-ч;
Dk - плотность тока, А/дм2;
ήтк - выход металла по току.
7.7 Расчет площадей помещения
Площади зданий АРП по своему функциональному назначению подразделяются на две основные группы:
- производственно-складские;
- вспомогательные.
В первую группу входят площади всех участков основного и вспомогательного производства, склады, общезаводские проходы и проезды.
Во вторую группу входят санитарно-бытовые помещения, пункты общественного питания, медпункты, управления, помещения для занятий и общественных организаций.
7.7.1 Расчет производственно-складских помещений (ПСП)
Площади ПСП рассчитывают двумя способами:
1. По удельным площадям.
2. По физическим показателям.
Расчет по удельным площадям ведется по следующей зависимости:
F = fэк1к2к3к4Nг;
где: fэ – удельная площадь для данного типа предприятий при эталонных условиях, м2/кр;
к1 – коэффициент приведения, учитывающий модель ремонтируе-мого автомобиля (агрегата);
к2 - коэффициент, учитывающий масштаб производства (величину производственной программы);
к3 – коэффициент, учитывающий количество моделей автомобилей (агрегатов), ремонтируемых на предприятии;
к3=1,03 – 1,07;
к4 – коэффициент, учитывающий соотношение в программе предприятия полнокомплектных автомобилей и товарных агрегатов;
Nг – годовая программа предприятия.
Значения коэффициентов приведены в справочной литературе. Значения удельных площадей указаны в справочнике на:
- одного рабочего (fp);
- единицу оборудования (fo);
- одно рабочее место (рабочий пост) (fрм);
- один КР (fпр.р).
Соответственно, расчет площадей производственных участков ведется по:
1. Удельной площади на одного рабочего – рассчитываются площади участков, имеющих малую насыщенность оборудованием с преобладанием ручных работ (сборка агрегатов; ремонт эл. оборудования и приборов питания ; медницко – радиаторный и т.п.).
2. Удельной площади на единицу оборудования – рассчитываются площади участков, насыщенные однотипным оборудованием, имеющим примерно одинаковые габариты(участки станочной обработки; испытательные станции; гальванические участки и т.п.).
3. Удельной площади на одно рабочее место – рассчитываются площади участков, в которых значительная часть площади занята рабочими.
Высота производственных помещений, м.
| Ширина пролета | |||
| до 12 м | 18 м | 24 м | |
| Здания без мостовых кранов |
3,6 4,2 4,8 5,4 6,0 |
5,4 10,8 6,0 12,6 7,2 8,4 доп. 4,8 9,6 |
5,4 9,6 6,0 10,8 7,2 12,6 8,4 |
| Здания с мостовыми кранами |
— |
8,4 12,6 9,6 14,4 10,8 |
8,4 12,6 9,6 14,4 10,8 |
8 ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ РЕМОНТА АВТОТРАНСПОРТНЫХ СРЕДСТВ
8.1 Основные положения
I. Экономическая сущность АРП-ва состоит в том, чтобы удовлетворять потребности АТ-та в обеспечении работоспособности автомобилей с минимальными издержками.
Конечный результат функционирования АРП-ва - это не ремонт как таковой, а обеспечение эксплуатационной готовности автомобиля, создание условий для более эффективной работы автомобильного транспорта по перевозке грузов и пассажиров.
АТ-т должен развиваться по законам расширенного воспроизводства. Но ремонт в системе расширенного воспроизводства на АТ-те занимает необычное место, т.к. он порожден двумя причинами:
1. Несовершенство конструкции автомобиля;
2. Наличие износа составных частей автомобиля при его эксплуатации.
В силу технического прогресса, конструкции автомобилей постоянно совершенствуются и объемы ремонта, вызванные данной причиной, постоянно уменьшается.
Появление новых конструкционных, эксплуатационных и ремонтных материалов, а также улучшение условий эксплуатации автомобилей (дороги, кадры водителей и технического персонала, совершенствование системы ТО и Р АТС и др.) способствует снижению интенсивности износных явлений и порожденных ими объемов ремонта.
Поэтому АРП-во в процессе расширенного воспроизводства АТ-та выражается в повышении качества ремонта, сокращении объемов и совершенствовании его организационных форм.
Подчиняясь закону экономии времени, АРП-во должно обеспечить экономию живого и овеществленного труда за счет совершенствования конструкции автомобиля и улучшения технологии их ремонта.
8.2 Основные технико-экономические показатели, характеризующие качество функционирования системы современного производства
Как и для любой организационной системы, для системы АРП должен быть определен критерий оптимальности ее функционирования (или развития).
Оптимальным вариантом развития и размещения системы АРП считается вариант, позволяющий удовлетворять потребности народного хозяйства в ремонтах автомобилей при минимальных затратах общественного труда и средств.
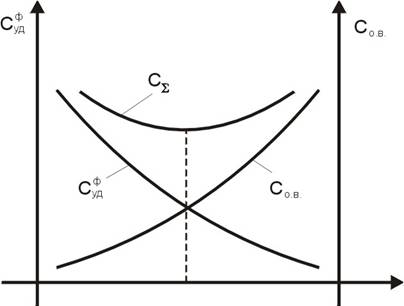
Рис.8.1. Составляющие эффективности производства
Судф – удельные затраты на обеспечение функционирования отдельных АРП.
Со.в. - затраты на обеспечение надежности связи отдельных АРП.
СΣ - совокупные (суммарные) затраты на функционирование системы авторемонтного производства.
Учитывая характер зависимостей влияния концентрации и специализации авторемонтного производства на составляющие совокупных затрат СΣ (рис. 1), обычно выделяют тир группы технико-экономических показателей авторемонтного производства:
I группа – показатели, определяющие размеры и системы авторемонтного производства и отдельных АРП:
а). потребность автомобилей в ремонте;
б). мощность АРП.
II-группа – показатели, характеризующие потребление трудовых и материальных ресурсов для обеспечения функционирования авторемонтного производства:
а). трудоемкость ремонта;
б). текущие затраты на ремонт;
в). капитальные вложения на строительство и реконструкцию АРП.
III группа – показатели, оценивающие затраты на обеспечение надежной взаимосвязи АРП:
а). затраты на транспортировку объектов ремонта;
б). затраты на создание, содержание и пополнение оборотного фонда агрегатов;
в). убытки вызванные потерями времени в системе.
8.3 Основные источники экономической эффективности
Ремонтное производство требует меньших затрат производственных ресурсов, поэтому ремонт автомобилей выступает как средство ускорения темпов роста общественного производства. Воспроизводство автомобиля в результате проведения капитального ремонта требует существенно меньшего количества металла из-за повторного использования деталей и, следовательно, меньше затрачивается эл. энергия и др. производственные ресурсы.
2. В настоящее время при существующей системе ремонта автомобилей создались возможности восстановления деталей на специализированных ремонтных заводах, на которых есть предпосылки для использования прогрессивной технологии, поточных методов и автоматизированных производственных процессах.
Для оценки экономической эффективности ремонта используют обычно частные показатели:
- производительность труда;
- объем производства;
- полную себестоимость;
- основные фонды и др.
Кроме частных показателей эффективности, используют и обобщающие показатели:
- темпы роста производства;
- производство чистой продукции на рубль затрат;
- общую рентабельность и др.
Обобщающий показатель эффективности можно определить по формуле:
Q
Пэ = ———,
p+m+n
где: Q – объем валовой продукции;
p – численность рабочей силы;
m – основные производственные фонды;
n – оборотные средства ( зап. части).
Основные производственные фонды и оборотные средства измеряются в условной численности к эквиваленту.
8.4 Методика оценки экономической эффективности капитального ремонта
Эффективность КРА определяется путем сравнительной оценки различных вариантов эксплуатации АТС. При этом все конкурирующие варианты должны быть равно возможны или иметь определенные ограничения на их использование.
В качестве конкурирующих вариантов при использовании автомобилей в АТП в течение t- лет могут быть следующие:
- новые автомобили, не подвергавшиеся КР;
- старые автомобили, подвергавшиеся только ТР;
- старые автомобили после КР;
- автомобили новых марок или модернизированные.
Целесообразность КРА обосновывают сравнительной оценкой народно-хозяйственной экономической эффективности использования автомобилей, прошедших КР со всеми конкурирующими вариантами. Все затраты за срок службы автомобиля делятся на две группы. К первой группе относятся затраты, связанные с погашением первоначальной стоимости. Ко второй группе – текущие затраты, на содержание и ремонт автомобилей за t-лет эксплуатации.
1. Затраты по приобретению и эксплуатации нового автомобиля в течение t-лет подсчитывают по формуле:
t
Sн (t)=Kн - C л (t) + åaibiCi;
1
где: Кн- стоимость нового автомобиля;
Сл(t)- ликвидационная стоимость автомобиля после эксплуатации в течение t-лет;
ai - коэффициент приведения разновременных затрат к первому году или к t+1-му году эксплуатации старого автомобиля и автомобиля после кап. ремонта;
bi- коэффициент, учитывающий изменения производительности нового автомобиля в зависимости от возраста;
Сi- текущие затраты на содержание и ремонт в t –ом году новых автомобилей, скорректированных на одинаковую производительность и срок службы.
aI = 1/ (1 + E)I-z ,
где: i – год, который приводится к z ;
z – год, к которому приводятся затраты ;
Е – коэффициент приведения, равный 0,1.
2. Суммарные затраты при эксплуатации старого автомобиля складываются только из затрат на содержание и ремонт автомобиля, так как первоначальная стоимость автомобиля была погашена в предыдущие t-лет эксплуатации:
2t
Sc(t) = Σ αi βi сi
t+1
3. Затраты на капитальный ремонт и последующую эксплуатацию отремонтированного автомобиля можно выразить формулой:
2t
Sp(t) = Kp+ åaibpiCpi
t+1
где: Kp – стоимость капитального ремонта автомобиля;
bpi,Cpi – то же самое, только для отремонтированных
автомобилей.
4. Суммарные затраты по приобретению автомобиля новой модели и эксплуатации его в течение t-лет:
t
Sм(t) = Kм – Cл(t) + åaibмiCмi;
i=1
где: Kм – скорректированная на одинаковую производительность и одинаковый срок службы, стоимость автомобиля новой модели;
bмi – коэффициент, учитывающий изменения производительности автомобиля новой модели в зависимости от возраста:
bi = Qt / Qo = (1 – bti),
где: Qo - годовая производительность нового автомобиля в 1-й год эксплуатации;
Qt - среднегодовая производительность автомобиля в t-ом году;
b - коэффициент ежегодного снижения производительности;
Смi – текущие затраты на содержание и ремонт в t-ом году автомобилей новых моделей, скорректированных на одинаковую производительность и срок службы.
5. Капитальный ремонт автомобилей оказывается экономически эффективным в том случае, если суммарные затраты за срок службы отремонтированных автомобилей будут наименьшими по сравнению с затратами других возможных вариантов:
Sp(t) < Sн(t);
Sp(t) < Sc(t);
Sp(t) < Sм(t).
Увеличение производства новых автомобилей требует увеличения прямых кап. вложений в автопромышленность примерно в 7-8 раз больших, чем на проведение КР того же количества автомобилей. На изготовление автомобилей затрачивается на 50-60% больше материалов и в 3-4 раза больше эл. энергии, чем на их КР. Времени для подготовки производства новых автомобилей требуется больше, чем времени на подготовку производства по выпуску капитально – отремонтированных автомобилей. Пусть эта разница составит to лет, тогда народное хозяйство недополучит прибыли на один автомобиль(при ориентации на использование только новых автомобилей) в размере дополнительных затрат:
DS = Пto = (QC1ц – S)to,
где : П – ср. годовая прибыль от 1-го автомобиля за срок его службы;
Q – ср. годовая производительность 1-го отремонтированного автомобиля;
Сц – цена единицы транспортной работы, выполненной автомобилем после КР;
S - средне годичные затраты на эксплуатацию одного капитально отремонтированного автомобиля.
Если to > 2 , то учитывают фактор времени:
t0
DS = åaI(QiC1ц – S)to,
i=1
где: aI – коэффициент приведения разновременных затрат к первому году эксплуатации автомобиля после КР.
Суммарные затраты при эксплуатации только новых автомобилей:
t t0
Sн(t) = Kн – См(t) + åaibiCi + åai(QiC1ц – Si).
i=1 i=1
Тоже для автомобилей новой модели.
Эффективность АРП-ва оценивают после каждого года эксплуатации автомобиля и выбирают наилучший вариант. Таким образом, определение эффективности КРА – процесс многошаговый, для которого необходимо постоянно собирать информацию и находить наилучшее решение с помощью динамичного программирования.