Главная
Рефераты по зарубежной литературе
Рефераты по логике
Рефераты по маркетингу
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по схемотехнике
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
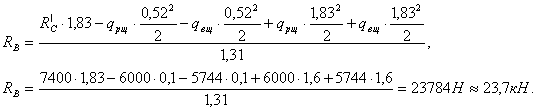
Дипломная работа: Разработка оборудования для дозировки балласта
Дипломная работа: Разработка оборудования для дозировки балласта
Сибирский государственный университет путей сообщения
Дипломный проект
по специальности "Подъемно-транспортные, строительные, дорожные машины и оборудование"
Тема: Разработка оборудования для дозировки балласта
Пояснительная записка
ДП 07.00.00.00 ПЗ
(обозначение документа)
2010
Содержание
Введение
1. Анализ конструкций оборудования для дозировки балласта
2. Расчет рабочего оборудования
2.1 Компоновка рабочего оборудования
2.2 Геометрические параметры дозатора
2.3 Кинематические параметры дозатора
2.4 Расчет сил действующих на дозатор
2.5 Тяговый расчет машины
2.6 Конструирование частей дозатора
2.7 Проектирование механизмов дозатора
3. Организация путевых работ
3.1 Выбор технологической схемы выполнения работ и типов машин
3.2 Разработка схем формирования рабочих поездов на станции и во время работ в "окно"
3.3 Определение основных параметров технологического процесса
3.4Разработка графика производства работ в "окно"
4. Экономический расчет
4.1 Расчет капитальных затрат на модернизацию
5. Охрана труда
Заключение
Список используемых источников
введение
Производится дозировка балласта по уровню. Возникает проблема дозировки балласта в кривых участках пути, то есть уровень дозировки не должен быть не равномерен по ширине поперечного профиля верхнего строения пути.
Электробалластеры являются универсальными многооперационными высокопроизводительными машинами непрерывного действия, предназначенными для постановки пути на балластное основание при выполнении работ по строительству и техническому обслуживанию пути, предусмотренных действующей системой ведения путевого хозяйства. Электробалластеры выполняют дозировку балласта, предварительно выгруженного вдоль пути, срезку балласта у торцов шпал, планировку откосов и междупутных зон призмы, подъемку путевой решетки на формируемый балластный слой. Производят грубую выправку и рихтовку пути, оправку обочин земляного полотна, работы на щебеночных базах для формирования штабелей балластных материалов, подъемку пролетных строений малых мостов при ремонте. Нашли применения двухсекционные электробалластеры пролетного типа ЭЛБ-3М, ЭЛБ-3ТС ( для транспортного строительства ), ЭЛБ-3МК и ЭЛБ-4. Базы для размещения оборудования у всех электробалластеров принципиально одинакова.
1. Анализ конструкций оборудования для дозировки балласта
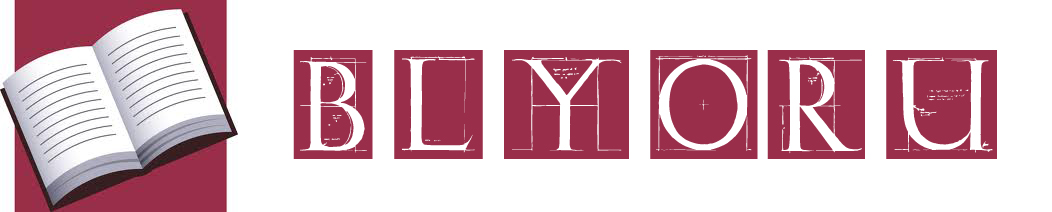
Дозатор предназначен для дозировки балласта, грубой оправки балластной призмы, срезки обочин земляного полотна, а так же для перераспределения балласта в продольном и поперечном направлениях по отношению к оси пути, срезки лишнего балласта и других работ. Электробалластер ЭЛБ-1 оборудован двумя дозаторами двустороннего действия, по одному на фермах № 1 и №2. Дозатор (рисунок 1) состоит из щита 14, двух крыльев 12, корневыми частями шарнирно соединенных со щитом, и подкрылков 10. Для управления дозатором имеются механизмы наклона крыла 8, подъема и опускания щита дозатора 4, поворота крыла 5 с редуктором 3, а также аппаратура управления электродвигателями и контроля положения дозатора. Щит дозатора представляет собой коробку, сваренную из листовой стали толщиной 6—8 мм, снабженную внутри ребрами жесткости и направляющими для перемещения щита по двум опорным стойкам 15, которые прикреплены к ферме машины. Он соединен валом 6 и карданным шарниром 7 с винтами типовых редукторов механизмов подъема и опускания дозатора.
Крыло дозатора состоит из корня крыла 13, собственно крыла 12, секторного ножа 11, подкрылка 10 и параллелограммной тяги 9. Наклон крыла осуществляет механизм наклона 8. Для наклона крыла винт перемещают вверх. При этом часть крыла, связанная с винтом, также поднимается, поворачивая крыло вокруг шарнира 2 и создавая нужный наклон крыла. При любых наклонах крыла в вертикальной плоскости подкрылок 10 остается параллельным своему первоначальному положению. Это достигается благодаря тому, что точки крепления подкрылка — шарнир 1 и шарнир параллелограммной тяги 9 на подкрылке — образуют с шарниром 2 и вторым шарниром тяги 9 на корне крыла параллелограмм. Одна сторона параллелограмма, связанная с корнем крыла, сохраняет постоянное направление, поэтому другая сторона, связанная с подкрылком, всегда ей
параллельна. Нижняя грань подкрылка в исходном положении горизонтальна, поэтому и при любом наклоне крыла она горизонтальна.
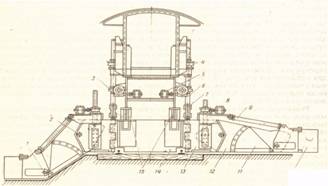
Рисунок 1- Дозатор
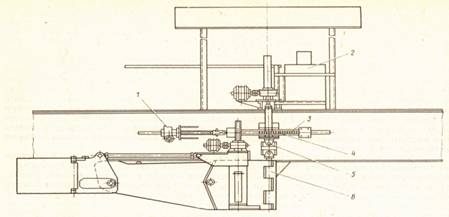
Рисунок 2- Дозатор в транспортном положении
Крыло поворачивают механизмом 1 (рисунок 2 ) поворота, винт которого соединяется шарнирно с рейкой 3, сцепленной с шестерней 4. Последняя посажена на вал поворота крыла и связана с ним скользящей шпонкой. В зави-симости от направления вращения электродвигателя винт перемещается влево или вправо. Перемещение винта и связанной с ним рейки 3 вызывает поворот шестерни 4, а следовательно, и вала механизма поворота. Поворот вала передается на крыло карданным валом 5 и валом петлевого шарнира 6, с которым крыло связано срезными штифтами и сегментными упорами. Такое соединение крыла с валом петлевого шарнира предохраняет самотормозящийся механизм поворота крыла от поломок при обрыве стяжек крыла или в других случаях перегрузки. Дозатором управляют с поста 2. Дозатор поднимают и опускают два механизма 4 (см. рисунок 2). При этом щит дозатора перемещается по опорным стойкам 15. Ход щитов дозаторов: фермы № 1 выше головки рельса 300 мм, ниже головки рельса 100 мм; фермы № 2 выше головки рельса 250 мм, ниже головки рельса 100 мм.
Электробалластер ЭЛБ-3м
Эта машина предназначена для выполнения балластировочных работ на пути с тяжелым типом верхнего строения (рельсы Р65, Р75 и железобетонные шпалы). По сравнению с ЭЛБ-1 в конструкцию электробалластера ЭЛБ-3М (рисунок 3) внесены изменения: увеличено расстояние между тележками 7 и 15 с 28 до 30,2 м, грузоподъемность электромагнитного подъемника доведена до 440 кН (вместо 300 кН); ход механизма подъема теперь составляет 450 мм, что на 50 мм больше; усилена конструкция дозатора, улучшена его маневренность благодаря увеличению скорости его подъема и опускания, а также установке механизма для прикрытия крыла во время дозировки; рельсовые и шпальные щетки снабжены электроприводом; в связи с увеличением нагрузки на тележку 15 вместо двухосной применена четырехосная тележка; для улучшения условий работы бригады машины увеличена кабина центрального поста 3 и установлен пост 2 управления дозатором 16.
Электробалластер ЭЛБ-3М состоит также из двух шарнирно сочлененных ферм9 (ферма №1) и 17 (ферма №2), на которых смонтированы все рабочие органы.Ферма № 2 опирается на двухосную тележку 18 и четырехосную тележку 15, аферма № 1 - на двухосную тележку 7 и междуферменный шарнир 14.
На ферме № 1 расположены кронштейн междуферменного шарнира 14,
Электромагнитный подъемник 13, балластерные рамы 12, механизмы сдвига пути 11 и подъема пути 4. У электромагнитного подъемника имеются р ельсовые захваты 10, предназначенные для страховочного удержания поднятой путевой решетки при зарядке струнок и подъемке мостов. Перед тележкой № 1 установлены шпальные и рельсовые щетки 8. В хозяйственной будке 6 размещается бригада во время транспортирования машины и хранится инструмент для обслуживания механизмов электробалластера и ухода за ними. На центральном посту управления 3 находятся приборы и аппараты для управления электромагнитным подъемником и балластерными рамами. На ферме № 2 расположены кронштейн междуферменного шарнира 14, дозатор двустороннего действия 16, машинное отделение 1 и пост 2 управления дозатором. Вдоль обеих ферм установлены перила 5.
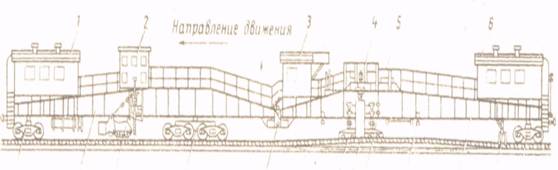
Рисунок 3-Электробалластер
Дозатор предназначен для дозировки балласта, выгруженного на путь перед машиной, а также для оправки балластной призмы и нарезки в междупутье траншеи, облегчающей проход по нему вибрационных уплотнительных плит. При выгрузке балласта на путь из хопперов-дозаторов, как правило, нет необходимости в дополнительной дозировке. Дозатор ВПО-3000 выполнен по типу дозатора электробалластера ЭЛБ-1, изменена лишь конструкция поворотного устройства крыльев, а основная часть крыла снабжена съемным плужком, необходимым для нарезки траншеи в междупутье.
Планировщики откосов
Они предназначены для подбора с обочины земляного полотна балласта, обрушенного основными уплотнительными плитами и обратной укладки его на откос, придания последнему проектного очертания, а также для засыпки в междупутья траншеи, образовавшейся при проходе уплотнительной плиты. Планировщик откосов состоит из крыльев, механизмов их наклона и подъема, а также телескопических распорок раскрытия крыльев.
Крыло планировщика откосов (рисунок 4) состоит из корня 5, планировочного крыла 5, секторного ножа 6, подкрылка 7, закрылка 8 и распорной тяги 4.
Планировочное крыло аналогично крылу дозатора, но имеет вырез для планировки откоса балластной призмы. Механизм наклона крыла планировщика откосов 2 предназначен для регулирования величины заглубления и положения крыла в процессе работы машины. Он установлен на корне крыла и по конструкции аналогичен механизму наклона крыла дозатора электробалластера ЭЛБ-1. Крайние положения крыла ограничены конечными выключателями.
Механизм подъема крыла планировщика 1 предназначен для опускания и подъема крыла при приведении его в рабочее и транспортное положения, а также при изменении режима его работы.
Он состоит из типового червячного редуктора, соединенного с электродвигателем привода. Втулка 9 закреплена свободно на ходовом винте редуктора и от поворота защищена направляющими, скользящими по продольному пазу колонны.
Подъем и опускание крыла осуществляются вращением ходового винта редуктора через втулку 9, которая контрится при фиксированном п о-ложении крыла планировщика.
Механизм поворота крыла планировщика откосов предназначен для изменения угла его открытия при переходе на другой режим работы машины и для приведения крыла в рабочее и транспортное положения.
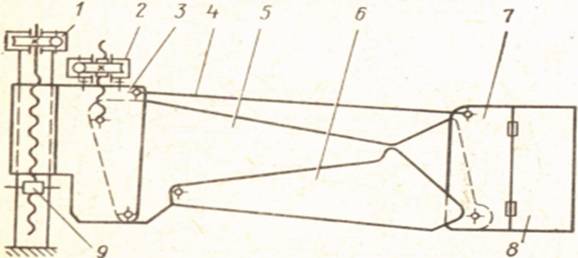
Рисунок 4- Крыло планировщика откосов
Дозатор, выполнен по типу дозатора электробалластера ЭЛБ-3МК, но с некоторыми конструктивными изменениями.
2. РАСЧЕТ МЕХАНИЗМА РАБОЧЕГО ОБОРУДОВАНИЯ
2.1 Компоновка рабочего оборудования на машине
Расположение дозатора определяется, в первую очередь, технологией производства работ. Оно не должно препятствовать установке других исполнительных органов и выполнению ими рабочих операций. Необходимо также учитывать требования быстрого приведения дозатора из транспортного положения в рабочее и наоборот.
К параметрам, определяющим компоновку дозатора,
относят: расстояние от ходового оборудования машины до основной подвески ![]() и опорных узлов рабочего оборудования
и опорных узлов рабочего оборудования ![]() . Схема компоновки дозатора
электробалластера ЭЛБ-3МК показана на рисунке 6.
. Схема компоновки дозатора
электробалластера ЭЛБ-3МК показана на рисунке 6.
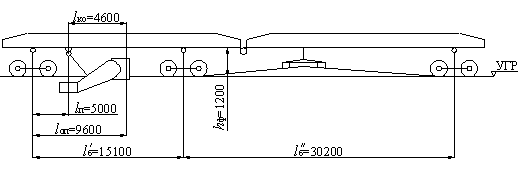
Рисунок 6 – Схема компоновки дозатора на электробалластере
В зависимости от основного назначения машины дозаторы
и планировщики призмы устанавливаются в различных местах по её длине. При балластированных
работах дозированию балласта предшествует выполнению подъемных работ.
Поэтому дозаторы устанавливают перед устройствами для вывешивания решетки. С
целью уменьшения изгибающих моментов в ферме подвеску рабочего органа и опорные
узлы дозатора размещают ближе к ходовым тележкам. Это также облегчает
вписывание дозатора в габарит подвижного состава на кривых участках пути.
Предварительно расстояния приняты конструктивно ![]() и по прототипу
и по прототипу ![]() .
.
2.2 Геометрические параметры дозатора
Расчет и выбор параметров дозатора производят с целью обеспечения возможности формирования балластной призмы в соответствии с заданным типом верхнего строения пути. Конструктивная схема дозатора представлена на рисунке 4. К геометрическим параметрам относят: параметры, определяющие расположение частей и элементов дозатора относительно рельсошпальной решетки или поверхности балластной призмы; размеры частей; параметры, определяющие взаимное расположение частей и элементов дозатора.
Требуемая толщина слоя балласта ![]() , м [2]:
, м [2]:
![]() , (1)
, (1)
где ![]() –
исходная толщина слоя балласта под шпалой, м;
–
исходная толщина слоя балласта под шпалой, м;
![]() – высота подъемки РШР, м.
– высота подъемки РШР, м.
Верхнее строение пути включает:
а) Шпалы железобетонные : длина шпалы Lшп =2,7 м;
ширина шпалы bшп=0,262м;
высота шпалы Ншп=0,15м.
б) Рельсы Р75: hр=h+5=0,192+0,005=0,195м (включает толщину подкладки) .
в) Плечо балластной призмы lпл=0,45м.
Для определения высоты ![]() рассматривается разность объемов
балласта, задозированного в шпальных ящиках на длине
рассматривается разность объемов
балласта, задозированного в шпальных ящиках на длине ![]() , и балласта, находящегося под
шпалами:
, и балласта, находящегося под
шпалами:
![]() , где (2)
, где (2)
![]() - объем шпалы;
- объем шпалы; ![]() -
объем задозированный под РШР;
-
объем задозированный под РШР;
![]() - объем подъемки РШР.
- объем подъемки РШР.
![]() ,
,
![]() .
.
![]() .
.
Размеры щита дозатора определяют вписыванием его в подферменное пространство с учетом нижнего очертания габарита подвижного состава.
Длина щита дозатора ![]() , м [2]:
, м [2]:
![]() , (3)
, (3)
![]() .
.
Наибольшая высота щита ![]() ,
м [2]:
,
м [2]:
![]() , (4)
, (4)
где ![]() - расстояние от нижнего уровня
головки рельса до нижнего пояса фермы, м (
- расстояние от нижнего уровня
головки рельса до нижнего пояса фермы, м (![]() [2 ]);
[2 ]);
![]() - расстояние от уровня головки рельса до самой нижней
части дозатора, м (
- расстояние от уровня головки рельса до самой нижней
части дозатора, м (![]() из условия безопасности).
из условия безопасности).
![]() .
.
Боковое крыло проектируют с учетом поперечного профиля пути и размеров балластной призмы и щита.
Высота корня крыла ![]() ,м
[2]:
,м
[2]:
![]() .
.
Длина корня крыла ![]() ,м
[2]:
,м
[2]:
![]() , (5)
, (5)
где x,y,z – координаты точек 1 и 2, м.
Координаты характерных точек крыла устанавливают по размерам элементов балластной призмы.
![]() .
.
![]() , (6)
, (6)
где ![]() - длина
балластной призмы поверху, м (
- длина
балластной призмы поверху, м (![]() );
);
![]() - угол наклона крыла дозатора к оси пути (
- угол наклона крыла дозатора к оси пути (![]() ).
).
Принят ![]() .
.
![]() .
.
![]() , (7)
, (7)
![]()
![]() (8)
(8)
. ![]()
![]() .
.
![]() .
.
Высота основной части крыла у его корня ![]() ,м [2]:
,м [2]:
![]() , (9)
, (9)
![]() .
.
Высота основной части крыла у козырька ![]() ,м [2]:
,м [2]:
![]() , (10)
, (10)
![]() .
.
Средняя высота откосной части крыла ![]() , м [2]:
, м [2]:
![]() .
.
Длина основной части крыла ![]() ,м
[2]:
,м
[2]:
![]() ,
,
![]() ,
,
. ![]()
![]() ,
,
![]() .
.
![]()
![]() ,
,
где ![]() -
расстояние от уровня головки рельса до поверхности земляного полотна в точке 3, м (
-
расстояние от уровня головки рельса до поверхности земляного полотна в точке 3, м (![]() ).
).
![]() .
.
Высота подкрылка ![]() ,
м [2]:
,
м [2]:
![]() .
.
Длина подкрылка ![]() принята
из прототипа и равна [3]:
принята
из прототипа и равна [3]:
![]() .
.
2.3 Кинематические параметры дозатора
К кинематическим параметрам дозатора относятся: скорость подъема дозатора; угловые скорости наклона и прикрытия крыла.
Кинематическая схема для определения скорости прикрытия крыла приведена на рисунке 5.
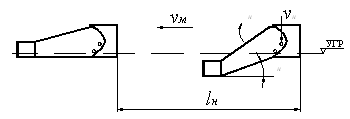
Рисунок 5 – Кинематическая схема механизма наклона крыла
Угловую скорость наклона крыла ![]() определяют из условия безопасного производства работ. При
проходе участка
определяют из условия безопасного производства работ. При
проходе участка ![]() со скоростью
со скоростью ![]() крыло из рабочего положения (
крыло из рабочего положения (![]() ) поднимают в положение с углом
) поднимают в положение с углом ![]() [2].
[2].
![]() ,
,
![]() , (11)
, (11)
![]() . (12)
. (12)
![]() , (13)
, (13)
![]() .
.
2.4 Расчет cил, действующие на дозатор
Дозатор режет балласт и перемещает его вдоль и поперек пути. Для определения сил, действующих на части дозатора, составлена расчетная схема, которая приведена на рисунке 6. С учетом геометрической компоновки частей дозатора, их размеров и расположения относительно поверхности призмы рассчитывают силы сопротивления балласта резанию и волочению соответствующих элементов.
Глубина резания щитом ![]() , корнем крыла
, корнем крыла ![]() , его основной частью
, его основной частью ![]() и подкрылком
и подкрылком ![]() принимают из условия производства работ в начале сооружения отвода
возвышения [2].
принимают из условия производства работ в начале сооружения отвода
возвышения [2].
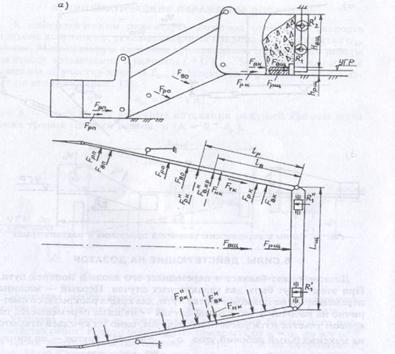
Рисунок 6- Силы действующие на дозатор
![]() м,
м,
![]()
Сила сопротивления балласта резанию для корня крыла ![]() , кН [2]:
, кН [2]:
![]() , (14)
, (14)
где к – коэффициент сопротивления балласта резанию,
кПа (для щебня ![]() [3] );
[3] );
![]() – глубина резания щебня корнем крыла, м;
– глубина резания щебня корнем крыла, м;
![]() – длина режущей части корня крыла, м.
– длина режущей части корня крыла, м.
![]() .
.
Сила сопротивления балласта волочению для корня крыла ![]() , кН [2]:
, кН [2]:
![]() , (15)
, (15)
где ![]() – плотность балласта,
– плотность балласта, ![]() ( для щебня
( для щебня ![]() [3] );
[3] );
![]() - ускорение свободного падения,
- ускорение свободного падения, ![]() (
(![]() ),
),
![]() - коэффициент внутреннего трения балласта (
- коэффициент внутреннего трения балласта (![]() [3] ).
[3] ).
![]() .
.
Сила сопротивления балласта резанию щита ![]() , кН [2]:
, кН [2]:
![]() , (16)
, (16)
![]() .
.
Сила сопротивления балласта волочению щита ![]() , кН [2]:
, кН [2]:
![]() , (17)
, (17)
![]() .
.
Сила сопротивления балласта резанию подкрылка ![]() , кН [2]:
, кН [2]:
![]() , (18)
, (18)
![]() .
.
Сила сопротивления балласта волочению подкрылка ![]() , кН [2]:
, кН [2]:
![]() , (19)
, (19)
![]() .
.
Сила сопротивления балласта резанию для основной части
крыла ![]() , кН [2]:
, кН [2]:
![]() , (20)
, (20)
где ![]() -
коэффициент сопротивления балласта резанию с учетом прижатия режущей кромки
крыла к обрабатываемой поверхности, кПа (
-
коэффициент сопротивления балласта резанию с учетом прижатия режущей кромки
крыла к обрабатываемой поверхности, кПа (![]() [2].
[2].
![]() .
.
![]() .
.
Сила на перемещение призмы волочения основной части
крыла ![]() , кН [2]:
, кН [2]:
![]() , (21)
, (21)
где ![]() , (22)
, (22)
![]() , (23)
, (23)
![]() (24)
(24)
Н0- средняя высота откосной части крыла, м.
![]() , (25)
, (25)
Подставляя значение Fвво в формулу для определения (21), получим:
![]()
![]() ,
,
![]() ,
,
 .
.
Сила трения балласта о поверхность крыла ![]() , кН [2]:
, кН [2]:
![]() , (26)
, (26)
![]() .
.
Суммарная приведенная сила резанию крыла без подкрылка
![]() , кН [2]:
, кН [2]:
![]() кН.
кН.
Суммарная приведенная сила волочению балласта крылом
без подкрылка ![]() , кН:
, кН:
![]() .
.
2.5 Тяговый расчет машины
Цель расчета: определить тягу локомотива при дозировке пути и подобрать локомотив
Исходные данные: уклон – 0,015; радиус кривой – 250м.; остальные данные взяты в пояснительной записке
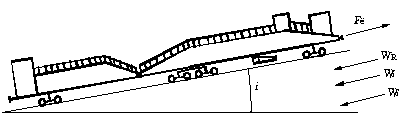
Рисунок 1 – Расчетная схема для определения действующих на машину сопротивлений
Суммарное сопротивление перемещению машины:
![]() ,
,
где к – коэффициент на неучтенные сопротивления;
![]() - сопротивление перемещению при дозировке;
- сопротивление перемещению при дозировке;
![]()
![]()
![]() - сопротивление перемещению машины как повозки:
- сопротивление перемещению машины как повозки:
![]() ,
,
где ![]() - вес
машины;
- вес
машины; ![]() - удельное сопротивление
перемещению машины;
- удельное сопротивление
перемещению машины;
![]() .
.
![]() .
.
![]() - сопротивление при движении на уклоне:
- сопротивление при движении на уклоне:
![]() ,
,
где ![]() -
удельное сопротивление движению на подъеме:
-
удельное сопротивление движению на подъеме:
![]() .
.
![]() - сопротивление при движении по кривой:
- сопротивление при движении по кривой:
![]() ,
,
где ![]() -
удельное сопротивление при движении по кривой:
-
удельное сопротивление при движении по кривой:
![]() .
.
![]() .
.
![]() - сопротивление при трогании с места:
- сопротивление при трогании с места:
![]() ,
,
где ![]() -
удельное сопротивление при трогании с места:
-
удельное сопротивление при трогании с места:
![]() ,
,
где ![]() -
нагрузка на колесную пару:
-
нагрузка на колесную пару:
![]() .
.
![]() .
.
Предварительно принимаем тяговую силу и принимаем локомотив при условии:
![]() .
.
![]()
Принят тепловоз ТЭ10 со следующими характеристиками:
Конструкционная скорость ![]() , км/ч ……………100;
, км/ч ……………100;
Расчетная масса, т………………………………..129;
Тип электродвигателя……………………………ЭД107.
На рисунке 2 приведена тяговая характеристика тепловоза ТЭ10 для соответствующей силы тяги.
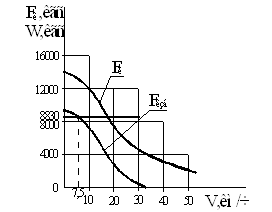
Рисунок 2 - Тяговая характеристика тепловоза ТЭ10
На рисунке 2 ![]() - касательная сила тяги тепловоза. По известной
- касательная сила тяги тепловоза. По известной ![]() определяют избыточную силу
тяги
определяют избыточную силу
тяги ![]() :
:
![]() .
.
![]() .
.
По графику определена скорость тепловоза при дозировке пути:
![]() 7,5км/ч = 2,08 м/с.
7,5км/ч = 2,08 м/с.
Данная скорость удовлетворяет, т.к. по прототипу
скорость при дозировке ![]() 1,39 – 4,17 м/с.
1,39 – 4,17 м/с.
Суммарное сопротивление перемещению машины:
![]()
2.6 Конструирование частей дозатора
При разработки металлоконструкции частей дозатора и узлов их соединений рассматриваются характерные случаи нагружения дозатора при реализации полной силы тяги локомотива. Первый случай – машина перемещается под уклон, оба крыла раскрыты на рабочий угол. Второй случай – машина перемещается на прямом горизонтальном участке, одно крыло раскрыто на наибольший рабочий угол, второе полностью прикрыто; третий случай – машина на прямом горизонтальном участке, одно крыло раскрыто на минимальный рабочий угол, второе полностью прикрыто. Первые два случая рассматриваются при расчете крыла на прочность.
При расчете крыла на прочность в первом приближении принимают следующую расчетную схему: крыло как балка на двух опорах с одной консолью; по длине балки действуют равномерно распределенные нагрузки qр.кр и qв.кр.
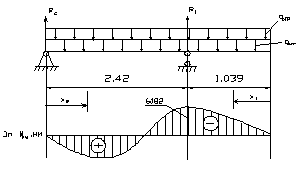
Рисунок 7- Схема сил действующих на крыло
Суммарная приведенная сила резанию и волочению крыла ![]() и
и ![]() , кН:
, кН:
\
![]() кН,
кН,
![]() кН.
кН.
Определяем равномерно распределенные нагрузки qр.кр и qв.кр, Н/м [2]:
 ; (28)
; (28)
 , (29)
, (29)
где ![]() и
и ![]() -суммарная приведенная
сила резанию и волочению крыла, кН.
-суммарная приведенная
сила резанию и волочению крыла, кН.
![]() Н/м;
Н/м;
![]() Н/м.
Н/м.
Определим реакции в опорах С и Е:
Мс=0: ![]() отсюда
отсюда

МЕ=0: ![]()
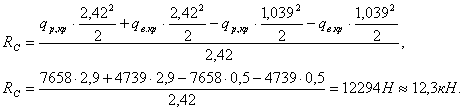
Нам необходимо определить наиболее опасное сечение крыла, для этого составим эпюру изгибающего момента.
Рассмотрим участки:
1 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]() ,
,
2 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
Определение момента кручения крыла
Вследствие смещения нагрузок qр.кр и qв.кр относительно опор в вертикальной плоскости крыло по длине будет скручиваться моментом М.кр.
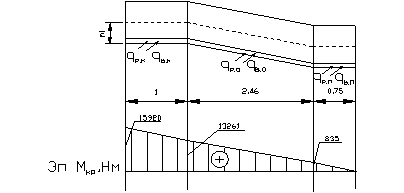
Рисунок 8- Схема для определения крутящего момента действующего на крыло
Для определения наиболее опасного сечения крыла, рассмотрим эпюру крутящего момента.
Рассмотрим участки:
1 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
2 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
3 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
Так как на крыло действуют изгибающий момент Мизг и момент кручения Мкр, то для определения наиболее опасного сечения приведем эти моменты к одному Мпр [6].
![]() , (30)
, (30)
![]()
Выполним подбор сечения крыла, для этого рассмотрим наиболее опасное сечение.
Рисунок 9 – Схема крыла в опасном сечении
Определим момент сопротивления Wz опасного сечения, см3 [6]:
![]() (31)
(31)
где h –высота сечения; b – ширина сечения.
Представим сечение в виде двух прямоугольников, тогда
![]() получим
получим
![]()
![]()
Определим напряжение в сечении [6]:
![]() (32)
(32)
![]() условие выполняется.
условие выполняется.
При расчете щита на прочность рассматривают первый и третий случаи нагружения дозатора. Для первого случая принимают следующую расчетную схему: щит как двухконсольная балка, на длине которой Lщ действуют равномерно распределенные нагрузки qрщ и qвщ.
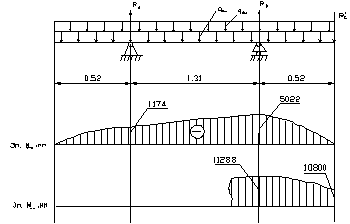
Рисунок 10 - Схема сил действующих на щит
Расстояние от консоли до ролика принято по прототипу lкщ=0,52м.
Определяем реакцию Rc|, действующую со стороны крыла:
![]()
Определяем равномерно распределенные нагрузки qрщ и qвщ, Н/м [2]:
 ; (33)
; (33)
 , (34)
, (34)
где ![]() и
и ![]() - сила резания и волочения
действующие на крыло, кН.
- сила резания и волочения
действующие на крыло, кН.
![]() Н/м;
Н/м;
![]() Н/м.
Н/м.
Определим реакции в опорах А и В:
МВ=0: ![]()
МА=0:
![]()
Нам необходимо определить наиболее опасное сечение щита, для этого составим эпюру изгибающего момента.
Рассмотрим участки:
1 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]() ,
,
2 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
3 участок ![]()
![]() :
: ![]()
![]() ,
,
![]()
![]() .
.
Для третьего случая нагружения принимают расчетную схему: щит как двухконсольная балка, на длине Lщ которой действуют равномерно распределенная нагрузка qкщ, сила Fскр на консоли от опирания крыла, происходит скручивание щита моментами Мкщ и Мскр.
Рисунок 11 – Схема действия крутящего момента на щит
Для определения наиболее опасного сечения крыла, рассмотрим эпюру крутящего момента.
Рассмотрим участки:
1 участок ![]()
![]() :
: ![]()
![]() ,
, ![]()
![]()
![]()
Так как на крыло действуют изгибающий момент Мизг и момент кручения Мкр, то для определения наиболее опасного сечения приведем эти моменты к одному Мпр.
![]() ,
,
![]()
Выполним подбор сечения крыла, для этого рассмотрим наиболее опасное сечение.
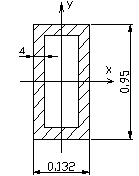
Рисунок 12 – Схема щита в опасном сечении
Определим момент сопротивления Wz опасного сечения:
![]()
где h –высота сечения; b – ширина сечения.
Представим сечение в виде двух прямоугольников, тогда ![]() получим
получим
![]()
![]()
Определим напряжение в сечении:
![]()
![]() условие выполняется.
условие выполняется.
3. Организация путевых работ
3.1 Выбор технологической схемы выполнения работ и типов машин
Капитальный ремонт производим при заданной глубине вырезки щебеночного балласта hв=0,3 м с применением машины СЧ-601.
График распределения работ по дням и участкам приведен на рисунке 2.
Для выполнения капитального ремонта пути выбран типовой технологический процесс. Технологическая схема работ по смене рельсошпальной решетки приведена на рисунке 3.
Для капитального ремонта пути с вырезкой балласта выбран типовой комплект машин, приведенный на рисунке 4.
| СЧ-601 | Путераз-борочный поезд | Планиров-щик балласта | Путеукла-дочный поезд | ХДС-1 | ЭЛБ-3 | ХДС-2 | ВПО- -3000 | ДСП |
Рисунок 4– Комплект машин
Длины по осям автосцепок выбранных путевых машин, применяемых в данном технологическом процессе (рисунок 3) приведены в таблице 1.
Таблица 1–Длина путевых машин
| Наименование машин | Тип машин | Длина по осям автосцепок, м |
| Тепловозвоз | 18,2 | |
| Щебнеочистительная машина | СЧ-601 | 24,82 |
| Укладочный кран (длина по стреле) | УК-25/9-18 | 44,0 |
| Хоппер-дозатор | ЦНИИ-ДВ З | 10,0 |
| Электробалластер | ЭЛБ-3 | 50,5 |
| Выправочно-подбовочно-отделочная машина | ВПО-3000 | 27,9 |
| Динамический стабилизатор пути | ДСП-1 | 17,4 |
| Прицепная платформа | 9,1 | |
| Моторная платформа | МПД | 16,3 |
| Универсальный тяговый модуль | УТМ-1 | 14,4 |
| Пассажирский вагон | 14,0 | |
| Четырехосная грузовая платформа | 14,2 |
3.2 Разработка схем формирования рабочих поездов на станции и во время работ в "окно"
Для выбранной технологической схемы КР пути (рисунок 3) и комплектов машин (рисунок 4) составляем технологическую схему расстановки рабочих поездов и групп рабочих по фронту при полном развороте всех работ в "окно", которая приведена на рисунке 5.
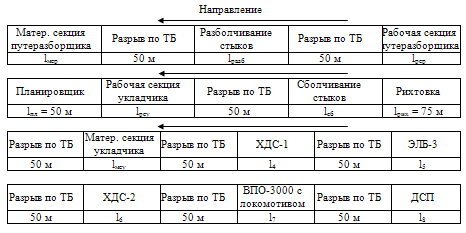
Рисунок 5- Технологическая схема расстановки рабочих поездов по фронту на момент полного разворота работ
Схема формирования рабочих поездов на станции приведена на рисунке 6.
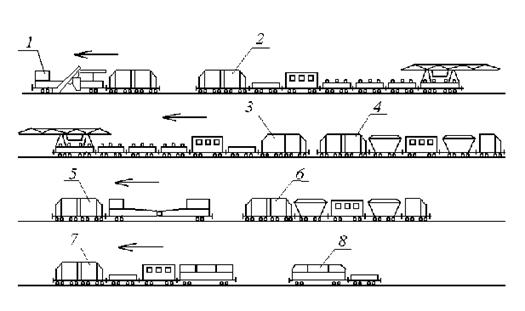
Схема формирования щебнеочистительного комплекса приведена на рисунке 7.
Схема формирования рабочих поездов на перегоне приведена на чертеже.
1 - щебнеочистительный поезд; 2 - путеразборочный поезд;
3 - путеукладочный поезд; 4 - ХДС-1; 5 - балластировочный поезд с ЭЛБ; 6 - ХДС-2; 7 - ВПО поезд с ВПО-3-3000; 8 - поезд с ДСП.
Рисунок 6– Технологическая схема формирования рабочих поездов на станции.
1-универсальный тяговый модуль УТМ-1; 2-щебнеочистительная машина СЧ-601; 3-механизированный бункерный полувагон; 4–механизированный концевой полувагон.
Рисунок 7 – Схема формирования щебнеочистительного комплекса.
3.3 Определение основных параметров технологического процесса
Время на оформление закрытия перегона и пробег машин к месту работ
tоф/з =tз +L/Vтр , (1)
где tз – время на оформление закрытия перегона, мин (tз =5мин);
L – расстояние от узловой станции до места производства работ, км (L=5…20 км);
Vтр – скорость движения машин в составе поезда, км/ч (Vтр=30км/ч).
tоф/з=5+10∙60 / 30=25 мин.
Время перевода машин из транспортного в рабочее положение tтрр=15 мин.
Время вырезки балласта на участке между блокпостами длиной LБП=5 км без учета времени на разгрузку состава засорителей.
tв=Vв·kр·α/ПТ/, (2)
где Vв–объем работ комплекса по вырезке, м3.
kр=1,08…1,12–коэффициент разрыхления;
α–коэффициент, учитывающий потерю времени на пропуск поездов, физиологический отдых и переходы в рабочей зоне.
ПТ/–производительность средняя в реальных условиях, м3/ч ( при вырезке ПТ/=300 м3/ч).
Vв= Vб- Vшп, (3)
где Vб – объем вырезаемого балласта без учета объема шпал, м3;
Vшп- объем занимаемый шпалами, м3.
Vб=Ав· LБП,(4)
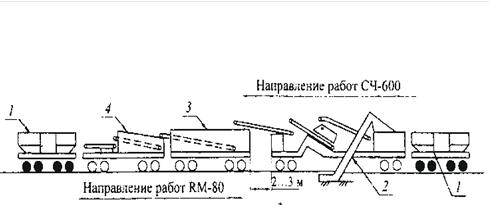
где Ав – площадь поперечного сечения вырезаемого слоя балласта без учета шпал, м2 ( рисунок 8).
Ав= hв (ВВ+ВН)/2,(5)
где hв- высота от плеча балластной призмы до границы вырезанного слоя, м.
ВВ, ВН–ширина соответственно верха и низа балластной призмы, м.
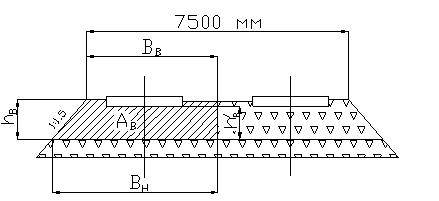
Рисунок 8–Схема к определению площади поперечного сечения вырезаемого балласта
hв=hв/+(hшп-∆), (6)
где hв/–глубина вырезки по заданию, м (hв/=0,2 м).
hшп – высота шпалы, м (hшп=0,18м);
∆ - расстояние от поверхности плеча балластной призмы до верхней границы шпалы, м (∆=0,03…0,02 м).
hв=0,6 (0,18-0,03)=0,36 м.
ВВ=7,5/2=3,75 м.
ВН=3,75+ hв ·1,5=3,75+0,36·1,5=4,29 м.
Ав=0,36(3,75+4,29)/2=1,45 м2.
Vб=1,45∙5000=7250 м3.
Объем шпал на длине LБП, м3:
Vшп =Vшп/∙ LБП , (7)
где Vшп/–объем шпал на 1 км, м3/км.
Vшп/= Вшп∙(hшп -∆)∙Lшп×Nэп, (8)
где Вшп – ширина шпалы, м (Вшп=0,25м);
Nэп – количество шпал на 1 км пути, шт (Nэп=1840шт).
Vшп/=0,25∙(0,18-0,03)∙2,75∙1840=190 м3/км.
Vшп=190·5=950 м3.
Vв =7250-950=6300 м3.
![]() (9)
(9)
где Т – продолжительность рабочей смены, мин (Т=492 мин);
St=t1+t2+t3, (10)
где t1 – время на переходы в рабочей зоне, мин (t1=15мин); t2 - время на отдых, мин ( t2=30мин.); t3 – время на пропуск поездов, мин.
 , (11)
, (11)
где Nпас – количество пар пассажирских поездов проходящих по участку в течении суток, (Nпас=40);
Nгр – количество пар грузовых поездов проходящих по участку в течении суток, (Nгр=30);
Hврпас – норма времени на пропуск одного пассажирского поезда, мин (Hврпас=1мин);
Hвргр – норма времени на пропуск одного грузового поезда, мин (Hврпас=1,5мин);
tсут – количество часов в сутки, ч (tсут=24ч);
tсм – количество часов в смену, ч (tсм=8,2ч).
![]() мин.
мин.
St=15+30+58=103 мин.
![]()
tв=6300·1,12·1,26/300=29,6ч=1778 мин.
Продолжительность работы ЩОК по заполнению состава засорителей tв/, мин:
tв/= tв (Vсз/ Vв), (12)
где Vсз–суммарный объем состава засорителей, м3.
Vсз=nпв·Vпв,(13)
где nпв–количество механизированных полувагонов в составе для засорителей, шт (nпв=10 шт);
Vпв–вместимость одного полувагона, м3 (Vпв=30 м2).
Vсз=10·30=300 м2.
tв=29,6(300/6300)=1,4 ч=85 мин.
Расстояние пробега машины при заполнении состава засорителей Lсз, м:
Lсз= LБП (Vсз/ Vв)(14)
Lсз= 5000(300/6300)=238 м.
Продолжительность выгрузки балласта из состава для засорителей tвыг, мин:
tвыг= tгр+ tр+ tпор,(15)
где tгр, tпор–время пробега машины от места работы ЩОК до места разгрузки и обратно, мин.
tгр=tпор=Lв/Vсз,(16)
Lв= LБП– Lсз(17)
Lв=5000-238=4762 м.
Vсз–скорость движения состава, км/ч (Vсз= 50 км/ч=50000 м/ч).
tгр=tпор=7762/50000=0,095ч=6 мин.
Время разгрузки
tр= Vсз/(b·hм·Vтр),(18)
где b–ширина конвейера, м (b=2,2 м);
hм–высота загружаемого слоя ВСП в промежуточных полувагонах, м (hм=0,75 м).
Vтр–скорость перемещения материала ВСП по транспортной ленте, м/с(Vтр=0,12 м/с).
tр= 300/(2,2·0,75·0,12)=1515 с=25 мин.
tвыг=6+25+6=37 мин.
Длина ЩОК СЧ-601 с составом для засорителей l1, м:
l1=lУТМ-1+l601+lПВ·nПВ+lКВ+ lУТМ-1 ,(19)
где lУТМ-1–длина универсального тягового модуля, м (lУТМ-1=14,4 м);
l601–длина СЧ-601, м (lСЧ=24,82 м);
lПВ–длина полувагона для засорителей, м (lПВ=16,62 м);
lКВ–длина концевого полувагона, м (lКВ=16,62 м).
l1=14,4+24,82+16,62·10+16,62+14,4=236,44 м.
Длина путеразборочного поезда l2, м:
l2=2∙lт+ lпл.пр.+ lпасс.в +Nгр× lгр+ Nмпд × lмпд + lпл.пр.+ lкр., (20)
где lт – длина одной секции электровоза, м;
lпл.пр.- длина платформы прикрытия, м;
lпасс.в - длина пассажирского вагона, м;
lгр – длина грузовой платформы, м;
Nгр – количество грузовых платформ, шт;
Nмпд – количество моторных платформ типа МПД, шт;
lмпд – длина моторной платформы типа МПД, м;
lкр – длина укладочного крана по стреле типа УК-25/9-18, м.
Nгр=2∙Nпакр(у) (21)
где Nпакр(у) – количество пакетов при разборке и укладке, шт.
 (22)
(22)
где nр(у)зв – количество звеньев в одном пакете при разборке и укладке, шт.
nр(у)зв определяется по:
-- характеристикам участка на, котором производится ремонт;
-- характеристикам подвижного состава входящий в ПРП и ПУП поезд.
Количество звеньев в одном пакете по условию грузоподъемности платформы крана (Рисунок 9):
 (23)
(23)
где l/пак – длина пакета находящийся на платформе крана, м (l/пак=17м);
Gпл.кран. – грузоподъемность платформы крана, кг (Gпл.кран.=40000кг);
mр.ш.р. – масса рельсошпальной решетки, кг.
mр.ш.р.=2∙mр+Nшп.зв×mшп., (24)
где mр – масса одного рельса, кг (mр=1292кг);
mшп – вес одной шпалы со скреплением, кг (mшп=90кг);
Nшп.зв – количество шпал в одном звене, шп.
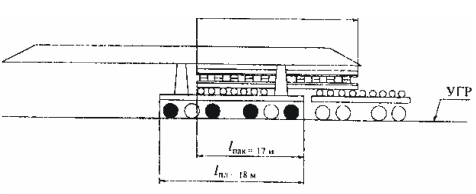
Рисунок 9–Схема расположения пакета на платформе крана
![]() (25)
(25)
![]() .
.
mр.ш.р.=2×1292+46×90=6724 кг.
![]()
Количество звеньев в одном пакете по условию грузоподъемности грузовой платформы:
 (26)
(26)
где Gпл.гр. – грузоподъемность грузовой платформы, кг (Gпл.гр.=60000 кг).
![]()
Количество звеньев в одном пакете по условию электрофицированности участков (Рисунок 10):
 (27)
(27)
где Hпак – высота занимаемая одним пакетом, м (из рисунка 10 Hпак=5750-1500-450-1450=2350мм);
Hзв – высота звена, м (Hзв =0,352 м).
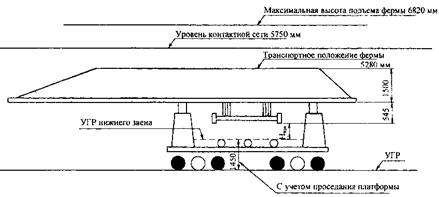
Рисунок 10 – Схема к определению допустимой высоты пакета
![]()
Количество звеньев в одном пакете по условию вместимости унифицированного съемного оборудования (УСО) определяется по техническим характеристикам УСО-3АМ:
nусо=6 (при всех видах шпал и типах рельсов).
Принимаем nрзв=6 шт.
![]()
![]() пл.
пл.
Количество моторных платформ:
 (28)
(28)
где nмот – количество пакетов перетягиваемых одной моторной платформой за один цикл, пак.
nмотi определяется по трем условиям:
1) по канатоемкости барабана тяговой лебедки крана (Sл=75м);
nsмотi=Sл / lзв, (29)
nsмот=75 / 25=3 пак.
2) по тяговому усилию барабана;
 , (30)
, (30)
где Др – диаметр ролика, м (Др=0,15м);
Fлi – тяговое усилие лебедки моторной платформы МПД, Н (Fл=29400Н);
d – диаметр цапфы ролика, м (d=0,12м);
b - коэффициент, учитывающий переход с платформы на платформу (b=1,5);
f – коэффициент трения качения в шарикоподшипниках (f=0,15);
m1 – коэффициент трения качения рельсов о ролики, м (m1=0,0004м);
i – наибольший уклон пути, (i=0,008).
 пак.
пак.
3) По технологии перетягивания пакетов (Рисунок 11).
Сначала лебедка МПД перетягивает 2 пакета, что соответствует ее тяговому усилию. Затем, т.к. длины каната хватает на 3 пакета, он закрепляется на третьем пакете, который связывается четвертым пакетом, и вновь перетягиваются 2 пакета. Таким образом, одной лебедкой платформы МПД можно перетянуть 4 пакета.
Рисунок 11–Схема перетягивания пакетов
Следовательно принимаем из условия перетягиванию пакетов: nмот=4 пак.
![]() пл.
пл.
Принято NМПД=2.
Число грузовых платформ
Nгр=14 - 2=12 пл.
l2=2×18,2+14,2+14,0+14×14,2+2×16,3+1×14,2+44=354,2 м.
Длина путеукладочного поезда l3:
Длину путеукладочного поезда находим, используя формулы, применяемые при расчете путеразборочного крана.
mр.ш.р.=2×1618+46×250=14736 кг.
![]()
![]()
![]()
nусо=6.
Принимаем nузв=6 шт.
![]()
![]()
nsмот=75/25=3 пак.
Для МПД:
 пак.
пак.
3) По технологии перетягивания пакетов.
С использованием обратного блока возможно перетягивать 4 пакета
Принимаем из технологии перетягивания пакетов с помощью обратного блока nмот=4 пак.
![]() пл.
пл.
Принято NМПД=2. Число грузовых платформ
Nгр=14пл.
Значит l3 =2×18,2+14,2+14,0+14×14,2+2×16,3+1×14,2+44=354,2 м.
Длина материальной секции разборщика (укладчика):
lмср(у)=l2(3) – lрср(у), (31)
где lрср(у) – длин рабочей секции разборщика (укладчика), м.
lрср(у)=lкр+nпл×lгр, (32)
где nпл – количество не самоходных грузовых платформ в рабочей секции разборщика (укладчика), шт (nпл=1 пл).
lрср(у)=44+2×14,2=72,8 м.
lмср=354,8 – 72,8=281,8м.
lмсу=354,2-72,8=281,8 м.
Длина ХДС-1 и ХДС-2 состава l4, м:
l4(6)=2∙lт+lх-д×Nх-д+ lпасс.в..+lт, (33)
где lх-д – длина хоппер-дозатора вагона, м (lх-д=10м);
Nх-д – количество хоппер-дозаторов в составе, шт.
 (34)
(34)
где VХДС-i – объем выгружаемого балласта, м3;
Vх-д – вместимость кузова, м3 (Vх-д=36 м3).
Необходимый объем Vнеобх, м3 :
Vнеобх = Vб - Vшп/, (35)
где Vб – объем вырезаемого балласта без учета объема шпал, м3;
Vшп/ - объем занимаемый шпалами на участке длиной lфр , м3.
Vб=Ав∙ lфр, (36)
где Ав – площадь поперечного сечения выгружаемого слоя балласта без учета шпал, м( рисунок 12).
Ав= hв (ВВ+ВН)/2,(37)
где hв- высота от плеча балластной призмы до границы вырезанного слоя, м. ВВ, ВН–ширина соответственно верха и низа балластной призмы, м.
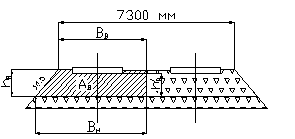
Рисунок 12–Схема к определению площади поперечного сечения выгруженного балласта
hв=hв/+(hшп-∆), (38)
где hв/–высота от подошвы шпалы до границы вырезанного слоя, м (hв/=0,2 м). hшп – высота торцевой части шпалы, м (hшп=0,15м);
∆ - расстояние от поверхности плеча балластной призмы до верхней границы шпалы, м (∆=0,03…0,02 м).
hв=0,2+(0,15-0,02)=0,33 м.
ВВ=7,3/2=3,65 м.
ВН=3,5+ hв ·1,5=3,5+0,33·1,5=4 м.
Ав=0,33(3,5+4)/2=1,24 м2.
Vб=1,24∙1000=1240 м3.
Объем шпал на длине lфр, м3:
Vшп/ =Vшп∙ lфр, (39)
где Vшп–объем шпал на 1 км, м3/км.
Vшп= Вшп∙(hшп -∆)∙Lшп×Nэп, (40)
где Вшп – ширина шпалы, м (Вшп=0,3м); Nэп – количество шпал на 1 км пути, шт (Nэп=1840шт).
Vшп=0,3∙(0,15-0,02)∙2,7∙1840=194 м3/км.
Vшп/ =194·1=194 м3. Vнеобх =1240-194=1046 м3.
VХДС-2=(hшп-D)∙Вв∙lфр –Vшп/, (41)
VХДС-2=(0,15-0,02)∙3,5∙1000-194=261 м3.
VХДС-1= Vнеобх - VХДС-2, (42)
VХДС-1=1046 – 261=1025,5 м3.
![]() ваг.
ваг.
![]() ваг.
ваг.
l4=2×18,2+22×10+14+18,2=288,6 м.
l6=2×18,2+8×10+14+18,2=148,6 м.
Длина поезда с машиной ЭЛБ-3М l5, м:
l5=2∙lт+lэлб, (43)
где lэлб – длина машины ЭЛБ-3М, м.
l5=2∙18,2+50,5=86,9 м.
Длина выпровочно-подбовочного поезда l7, м:
l7=lт+lпасс.в.+lпл.пр.+lвпо, (44)
l7=18,2+14+14,2+27,9=70,5 м.
Длина состава динамического стабилизатора пути , м:
l8=lдсп+lпл, (45)
l8=17,4+ 9,1=26,5м.
3.4 Разработка графика производства работ в "окно"
Продолжительность "окна" То, мин:
То=tразв +tу +tсв , (46)
где tразв- время необходимое на разворот работ перед укладкой пути путеукладочным краном, мин;
tу – время выполнения в "окно" ведущей операции, мин;
tсв- время необходимое на свертывание работ, для приведения пути в исправное состояние после его укладки, мин.
Время на оформление закрытия перегона и пробег машин к месту работ
t1=t!+L/Vтр , (47)
где t! – время на оформления закрытия перегона, мин (t!=5мин);
L – расстояние от узловой станции до места производства работ, км (L=3…10 км);
Vтр – скорость движения машин в составе поезда, км/ч (Vтр=50км/ч).
t1=5+10∙60 / 50=17 мин.
Время перед началом работ по разболчиванию пути t2, мин:
t2=(ТБ+lМСР+lразб)∙a / Vтр, (48)
где lразб – фронт работ, занимаемый бригадой по разболчиванию стыков, м.
lразб=nбр∙lзв / nст, (49)
где nбр – количество монтеров пути в бригаде по разболчиванию стыков, чел; nст – количество человек на одном стыке, чел (nст =4 чел).
nбр =Тб / tр(у) (50)
где Тб - затраты труда на весь объем работ по разболчиванию пути, чел.-мин.
tр(у) –время работы разборочного(укладочного) крана, мин.
Тб =nболт∙ Нвр разб ∙a, (51)
где nболт – общее количество болтов на длине lфр, шт;
Нвр разб -норма времени на разболчивание одного болта, чел.-мин (Нвр разб=0,91 чел.-мин).
nболт =( lфр / lзв+1)∙ nстб, (52)
где nстб - количество болтов в одном стыке, шт (nстб = 8 шт).
nболт =( 1000/ 25+1)∙8=328 шт.
Тб =328∙0,91∙1,26= 376 чел.-мин.
tр(у) =(lфр / lзв )∙ Нвр р(у) ∙a, (53)
где Нвр р(у) - норма времени разборки (укладки) пути, чел.-мин (Нвр р(у) =2,2 чел.-мин).
tр(у) =(1000/ 25)∙2,2∙1,26=114 мин.
Так как tр= tу, принимаем в качестве ведущей операции укладку пути с Нврв=2,2 чел.-мин.
nбр =376 / 114=3,3чел.
Принято nбр =4 чел.
lр=4·25 / 4=25м.
t2=(50+281,8+25) ∙1,26/(50·1000/60)=1 мин.
Интервал времени между началом работ по разболчиванию пути и началом разборки пути разборочным краном t3, мин:
t3=(ТБ+lРСР) Нвр в ∙a/ lзв, (54)
t3=(50+58,2)∙2,2∙1,26/25=12,5 мин.
Интервал времени между началом работы разборочного и укладочного кранов t4, мин:
t4=(lпл / lзв )∙Нвр в∙a, (55)
где lпл–фронт работ планировки земляного полотна, м(lпл=50 м).
T4=(50/25)∙2,2∙1,26=6 мин.
Интервал времени между началом работы укладочного крана и работ по сболчиванию пути t6, мин:
T5=(lРСУ+ТБ+lсбол )∙ Нвр в ∙a/lзв, (56)
lсбол –длина фронта работ по сболчиванию пути, м.
lсбол =Сболт/ ∙lзв /(4∙tб), (57)
где Сболт - суммарные затраты труда на постановку накладок, сболчивание стыков и перегонку стыковых шпал, чел.-мин;
tб - время необходимое на постановку накладок, сболчивание стыков в темпе работы путеукладочного крана, мин (tб = tу).
Сболт/ =Сболт+Спер, (58)
где Сболт - суммарные затраты труда на постановку накладок, сболчивание стыков, чел.-мин; Спер - затраты труда на перегонку стыковых шпал, чел.-мин.
Сболт =nст/ ∙HврБ∙a, (59)
где nст/ - количество стыков на длине lфр, ст; HврБ - норма времени на сболчивание одного стыка и постановку накладок, чел.-мин (HврБ =15 чел.-мин).
nст/= lфр / lзв +1, (60)
nст/=1000 /25 +1=41 ст.
Сболт =41∙15∙1,26=775 чел.-мин.
Спер =nшп ∙Нвршп∙a, (61)
где nшп - количество стыковых шпал, шп; Нвршп - норма времени на постановку одной шпалы, чел.-мин (Нвршп =0,89 чел.-мин).
nшп =2∙(lфр / lзв )+2, (62)
nшп =2∙(1000 / 25)+2=82 шп.
Спер =82∙0,89∙1,26=92 чел.-мин.
Сболт/ =775+92=867 чел.-мин.
lсбол =867∙25 /(4∙114)=49 м.
t5 =(58,2+50+49)∙2,2∙1,26/25 =17,4 мин.
Интервал времени между началом работ по сболчиванию пути и началом его рихтовки t6, мин:
t6=(lрихт / lзв )∙ Нвр в ∙a, (63)
t6=(75 / 25)∙2,2∙1,26=9 мин.
Интервал времени между началом рихтовки пути и началом МСУ t8, мин:
t7=(ТБ / lзв )∙ Нвр в ∙a, (64)
t7=(50 /25)∙2,2∙1,26=6 мин.
Интервал времени между началом МСУ и началом ХДС-1 t8, мин:
t8=( (lМСУ + ТБ) / lзв )∙ Нвр в ∙a, (65)
t8=((281,8+50) /25)∙2,2∙1,26=37 мин.
Интервал времени между началом ХДС-1 и началом ЭЛБ t9, мин:
t9=( (l4 + ТБ) / lзв )∙ Нвр в ∙a, (66)
t9=( ( 288,6+50) / 25)∙ 2,2∙1,26=38 мин.
Интервал времени между началом ЭЛБ и началом ХДС-2 t10, мин:
t10=( (l5 + ТБ) / lзв )∙ Нвр в ∙a, (67)
t10=( (86,9+50) / 25)∙ 2,2∙1,26=16 мин.
Интервал времени между началом ХДС-2 и началом ВПО t11, мин:
t11=( (l6 + ТБ) / lзв )∙ Нвр в ∙a, (68)
t11=( (148,6 +50) / 25)∙ 2,2∙1,26=23 мин.
Интервал времени между началом ВПО и началом ДСП t12, мин:
t12=( (l7 + ТБ) / lзв )∙ Нвр в ∙a, (69)
t12=( (70,5+50) / 25)∙ 2,2∙1,26=14 мин.
После окончания работ по соединению нового пути со старым (линия изменения темпа потока) оставшиеся машины могут работать со своей максимально допустимой рабочей скоростью, с соблюдением ТБ.
Потоки машин следующих за МСУ ведущей машиной является ВПО-3000.
Расстояние l9 от начала ВПО до lфр определяется по графику основных работ в "окно".
Интервал времени t13, мин:
t13=l9 / VВПО∙a, (70)
t13= (1000/2000)∙60∙1,26=38 мин.
Продолжительность "окна" То=236мин.
4 Экономический расчет
4.1 Расчет экономической эффективности применения разрабатываемого устройства
Основным обобщающим показателем, определяющим эффективность внедрения новой техники, является экономический эффект, в котором находят отражение все показатели, характеризующие новую разработку [16].
Годовой экономический эффект от оборудования для дозировки балласта:
![]() , (4.1)
, (4.1)
где ![]() -
годовая выручка от использования устройства, руб;
-
годовая выручка от использования устройства, руб;
![]() - годовые затраты на эксплуатацию устройства, руб.
- годовые затраты на эксплуатацию устройства, руб.
Годовая выручка от использования устройства ![]() , руб [16]:
, руб [16]:
![]() , (4.2)
, (4.2)
где ![]() -
годовая производительность устройства,
-
годовая производительность устройства, ![]() ;
;
![]() - цена единицы продукции,
- цена единицы продукции, ![]() .
.
Годовые затраты на эксплуатацию устройства ![]() , руб [16]:
, руб [16]:
![]() , (4.3)
, (4.3)
где C -
эксплуатационные затраты на использование устройства, ![]() ;
;
![]() - количество машино-часов работы устройства,
- количество машино-часов работы устройства, ![]() .
.
![]() , (4.4)
, (4.4)
где Д – количество рабочих дней машины в году (машина работает 6 месяцев в году);
![]() - время смены, ч (
- время смены, ч (![]() =8
ч);
=8
ч);
![]() - количество смен (
- количество смен (![]() =2);
=2);
![]() - коэффициент, учитывающий время простоя (
- коэффициент, учитывающий время простоя (![]() =0,8 [16]).
=0,8 [16]).
Количество рабочих дней машины в году Д:
Д = 365/2 – åП, (4.5)
где åП – количество выходных и праздничных дней в период работы машины (åП=53 дня).
Д = 365/2 – 53=130 дней.
Количество машино-часов работы устройства
![]() ,
, ![]() [16]:
[16]:
![]()
![]() .
.
Годовая производительность устройства ![]() ,
, ![]() [16]:
[16]:
![]() , (4.6)
, (4.6)
где П – производительность устройства, ![]() (П=80
(П=80 ![]() ).
).
![]()
![]() .
.
Цена единицы продукции ![]() ,
,
![]() [16]:
[16]:
![]() , (4.7)
, (4.7)
где ![]() - норма
времени,
- норма
времени, ![]() ;
;
![]() - норма накладных расходов (
- норма накладных расходов (![]() =0,3 [16]);
=0,3 [16]);
![]() - норма плановых накоплений (
- норма плановых накоплений (![]() =0,3 [16]).
=0,3 [16]).
Норма времени
![]() ,
, ![]() [16]:
[16]:
![]() . (4.8)
. (4.8)
![]()
![]() .
.
Себестоимость машино-часа работы устройства С, ![]() [16]:
[16]:
![]() , (4.9)
, (4.9)
где ![]() -
заработная плата машиниста,
-
заработная плата машиниста, ![]() ;
;
![]() - затраты на ремонт,
- затраты на ремонт, ![]() ;
;
![]() - затраты на амортизацию,
- затраты на амортизацию, ![]() ;
;
![]() - расход электроэнергии на работу электродвигателей,
- расход электроэнергии на работу электродвигателей, ![]() .
.
Заработная плата машиниста ![]() ,
,![]() [16]:
[16]:
![]() , (4.10)
, (4.10)
где ![]() -
тарифная ставка машиниста,
-
тарифная ставка машиниста, ![]() (
(![]() =63
=63 ![]() );
);
![]() - районный коэффициент (
- районный коэффициент (![]() =1,25
[16]);
=1,25
[16]);
![]() - коэффициент, учитывающий начисления на заработную
плату (
- коэффициент, учитывающий начисления на заработную
плату (![]() =1,365 [16]);
=1,365 [16]);
![]() - коэффициент премирования (
- коэффициент премирования (![]() =1,25 [16]).
=1,25 [16]).
![]() руб.
руб.
Затраты на ремонт ![]() ,
,
![]() [16]:
[16]:
![]() , (4.11)
, (4.11)
где ![]() -
заработная плата ремонтнику,
-
заработная плата ремонтнику, ![]() ;
;
![]() - затраты на ремонтные материалы,
- затраты на ремонтные материалы, ![]() .
.
Заработная плата ремонтнику
![]() ,
, ![]() [16]:
[16]:
![]() , (4.12)
, (4.12)
где ![]() -
часовая ставка ремонтника,
-
часовая ставка ремонтника, ![]() (
(![]() =30
=30 ![]() );
);
![]() - удельная трудоемкость ремонта на один машино-час,
- удельная трудоемкость ремонта на один машино-час, ![]() (
(![]() =0,5
=0,5 ![]() [16]).
[16]).
![]()
![]() .
.
Затраты на ремонтные материалы ![]() ,
, ![]() [16]:
[16]:
![]() , (4.13)
, (4.13)
где ![]() -
коэффициент перехода от заработной платы ремонтнику к стоимости ремонтных
материалов (
-
коэффициент перехода от заработной платы ремонтнику к стоимости ремонтных
материалов (![]() =2 [16]).
=2 [16]).
![]()
![]() .
.
![]()
![]() .
.
Затраты на амортизацию ![]() ,
,
![]() [16]:
[16]:
![]() , (4.14)
, (4.14)
где ![]() - норма
амортизации, % (
- норма
амортизации, % (![]() =15% [16]);
=15% [16]);
К – стоимость устройства, руб. (К=728424 руб. таблица 4.1);
![]()
![]() .
.
Расходы электроэнергии на работу электродвигателей ![]() ,
, ![]() [16]:
[16]:
![]() , (4.15)
, (4.15)
где ![]() -
суммарная мощность электродвигателей, кВт (
-
суммарная мощность электродвигателей, кВт (![]() =0,92
кВт);
=0,92
кВт);
![]() - стоимость единицы электроэнергии,
- стоимость единицы электроэнергии, ![]() (
(![]() =2
=2 ![]() );
);
К – коэффициент использования во времени (К=0,8 [16]).
![]()
![]() .
.
![]()
![]() .
.
Цена единицы продукции по формуле (4.7):
![]()
![]() .
.
Годовые затраты по формуле (4.3):
![]() руб.
руб.
Таблица 4.1 – Калькуляция изготовления в условиях производства малой мощности одной машины для уплотнения грунта и покрытий
|
Наименование затрат на изготовление (по данным ИГД) |
Стоимость, руб. |
| Норма времени, ч | 130 |
| Основная зарплата | 7000 |
| Начисления (26,2 %) | 1834 |
| Материалы и комплектующие изделия | 60000 |
|
Накладные расходы в том числе: тепло- и электроэнергия амортизация основных средств инструмент и спецоснастка содержание вспомогательных рабочих МОП, АУП прочие расходы (налоги) |
6350 4500 3450 3000 2700 |
| Стоимость проектно-конструкторских работ | 20000 |
| Всего себестоимость | 108834 |
| Плановая рентабельность (18 %) | 19590 |
|
Отпускная цена |
728424 |
Годовая выручка по формуле (4.2):
![]() руб.
руб.
Годовой экономический эффект по формуле (4.1):
![]() руб.
руб.
Показатель экономической эффективности ![]() [16]:
[16]:
![]() . (4.16)
. (4.16)
![]() . (4.17)
. (4.17)
где ![]() -
нормативный показатель экономической эффективности (
-
нормативный показатель экономической эффективности (![]() =0,15
[16]).
=0,15
[16]).
![]() .
.
![]() .
.
Срок окупаемости ![]() ,
год [16]:
,
год [16]:
![]()
![]() . (4.18)
. (4.18)
![]() года.
года.
Условие (4.17) выполнено, следовательно, внедрение разработанного оборудования для дозировки балласта с экономической точки зрения выгодно.
5. охрана труда
Мероприятия по обеспечению безопасности движения поездов и техники, личной безопасности при производстве механизированных работ.
Порядок закрытия перегона и ограждения места работ.
Закрытие перегона или одного из путей производится с разрешения начальника отделения дороги и по согласованию с начальником службы движения, если предоставляемое "окно" не вызывает изменения установленных размеров движения с соседними дорогами. Если такое закрытие вызывает изменения установленных размеров движения и время прибытия поездов на соседние дороги, оно может быть разрешено только начальником дороги по согласованию с Управлением движения МПС (ЦД МПС).
Порядок ограждения мест производства работ осуществляется в соответствии с Инструкцией по обеспечению безопасности движения поездов при производстве путевых работ (ЦП/4402) с учетом требований Инструкции по сигнализации на железных дорогах Российской Федерации. Порядок ограждения приведен на рисунок 5.1.
При фронте работ более 200 м на расстоянии 50 м от границы участка устанавливают красные сигналы, охраняемые сигналистами с ручными красными сигналами. Когда место производства работ находится вблизи станции, то ограждение производится переносным красным сигналом, установленным по оси пути против входного сигнала или сигнального знака "Граница станции", с укладкой трёх петард, охраняемых сигналистами. Места производства работ, требующие следования поездов с уменьшенной скоростью на перегонах ограждают с обеих сторон от границы участка работ на расстоянии 50 м переносными сигналами "Начало опасного места" и "Конец опасного места".
Технические требования на приемку отремонтированного пути
Приемку отремонтированных участков пути выполняют после проведения всего комплекса работ комиссионно под председательством начальника дистанции пути.
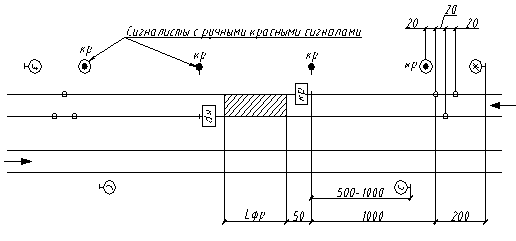 Рисунок 5.1 – Ограждение места работ.
Рисунок 5.1 – Ограждение места работ.
В состав комиссии входят: исполнитель работ, приемщик по качеству ремонта, дорожный мастер и бригадир пути.
При сдаче отремонтированных участков пути составляется акт приемки выполненных работ по форме ПУ-48 и представляется следующая техническая документация: исполненный продольный профиль; графики, отражающие состояние кривых участков пути по стрелам прогиба; выписка из ведомости состояния отремонтированного пути по данным вагона-путеизмерителя (для станционных путей — по данным путеизмерительной тележки или ручных промеров); акт об укладке в путь сварных рельсовых плетей;ведомость состояния стыковых зазоров и др.
заключение
В данной работе в соответствии с поставленной целью были выполнены: анализ конструкций оборудования для дозировки балласта, расчет рабочего оборудования, компоновка рабочего оборудования на машине, геометрические параметры дозатора, кинематические параметры дозатора, расчет сил, действующих на дозатор, тяговый расчет машины, конструирование частей дозатора, проектирование механизмов дозатора, организация путевых работ, экономический расчет, в котором определяли экономическую эффективность модернизации существующей техники, применяемой в тех же работах при таких же условиях. Из проделанных расчетов видно, что разработанное новое оборудование окупается через 28 месяцев. Охрана труда и графические документы.
список используемых источников
1. Задорин Г. П. Дозирующие и профилирующие устройства путевых машин: Методические указания к курсовому и дипломному проектированию. Новосибирск: Изд-во СГУПСа, 2000. – 38 с.
2. Ахметзянов М. Х., Лазарев И. Б. Сопротивление материалов. Учебное пособие для вузов. Новосибирск: СГУПС, 1997. 300 с.
3. Путевые машины: Учебник для вузов ж.-д. транс./ С.А. Соломонов, М.В. Попович, В.М. Буганко и др. Под ред. С.А. Соломонова. – М.: Желдориздат 2000 – 756 с.
4. Машиностроительные материалы. Краткий справочник. М.: Машиностроение. 1969. 352 с.
5. Машиностроительные материалы. Краткий справочник. М.: Машиностроение. 1969. 352 с.
6. Курсовое проектирование деталей машин: Учебное пособие / Сост. С. А. Чернавский, К. Н. Боков и др. М., 2005. 416 с.
7. Курсовое проектирование деталей машин: Учебное пособие / Сост. С. А. Чернавский, К. Н. Боков и др. М., 2005. 416 с.
8. Ядрошникова Г.Г., Хекало О.Ю., Шаламова О.А. Экономическая эффективность внедрения новой (модернизированной) техники. Методические указания по выполнению контрольной работы. Новосибирск, 2004. 12с.
9. Раздорожный А.А. Охрана труда и производственная безопасность: учебно-методическое пособие. М., 2006. 512 с.
10. СТО СГУПС 1.01СДМ.01-2007. Курсовой и дипломный проекты. Требования к оформлению. Новосибирск, 2007. 60 с.
11. СТО СГУПС 1.01СДМ.02-2008. Работа выпускная квалификационная по специальности "Подъемно-транспортные, строительные, дорожные машины и оборудование". Новосибирск, 2007. 28 с.
12. Толмазов А. Ф. Электробалластеры: материал технической информации.- М.: Транспорт, 1965. 151 с.